


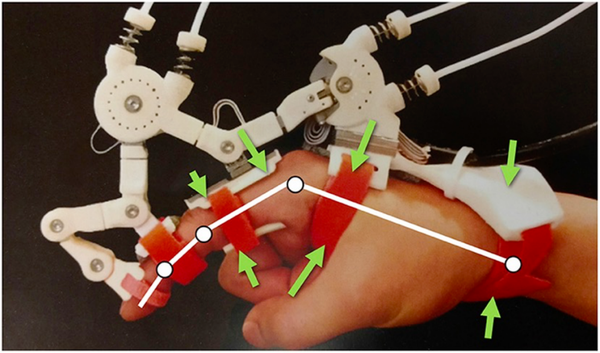
物理人机界面交互 (PHRII):通过机器人和人类之间的物理界面传递力来发挥作用。这些组织喷雾位置是复杂的子系统,涉及高层组织(皮肤、筋膜、皮下、被手术等)以及(图1)
当力施加在PHRII和组织的安装上时,会发生复杂的静态和动态响应,从而导致滑移、局部压力和提升等现象。这些复杂的响应导致估计机器人和人体之间的相对位置和力分配存在很大的不确定性。这些不确定性对机器人的控制框架以及人类的人体工程学和安全考虑产生不利影响。
例如,微小的相对惯性或滑动可能会导致人与机器人的关节轴之间未对准,从而导致人类关节上产生很多不需要的力。这些相对惯性会导致人机连接系统的控制模型出现错误,从而导致不稳定,特别是在使用自适应控制等模型敏感策略时。
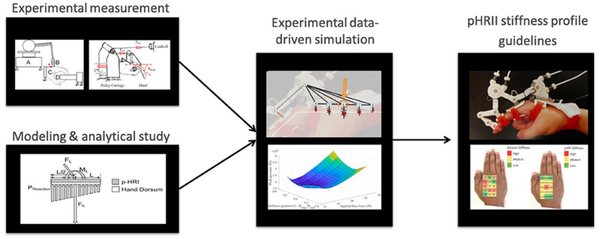
因此,设计人体与可穿戴机器人之间的物理连接是一项具有互操作性的工作。通过将实验测量的生物组织特征与新型动态建模工具相结合,可以系统地改进物理人机交互界面(PHRII) ))的设计。
在接下来的部分中,新颖模拟框架 HuRoSim 的基础上,通过两个实验优化 PHRII 的新颖方法概述(图 2)。
实验一:使用HuRoSim来预测手和连接器外部连接器之间的复杂连接。
实验二:将 HuRoSim与手背表面刚度的实验测量结合起来,以优化PHRII的设计。
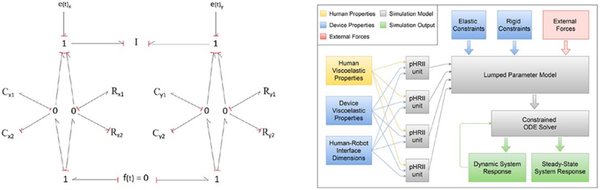
HuRoSim 是在 Matlab 中构建的动态仿真框架,用于表征手外骨骼和手之间 PHRII 处的交互行为。 HuRoSim 构建为集总参数系统,在 3D 空间中排列为节点网络。这些节点通过约束连接,每个节点都有自己的一组参数和属性。这种优先配置 HuRoSim 用户能够重新节点并模拟各种 PHRII 系统。
PHRII仿真模型包含许多可以影响机器人刚性参考结构与人类参考(第三方)结构之间响应的特征。这包括:人体组织(皮肤、筋膜和皮下组织)的粘弹性特性、PHRII尺寸和几何形状、界面处使用的填充物的机械特性、沿界面的滑动以及机械特性,包括设备与设备之间的core力。组织或固定带的预张力。
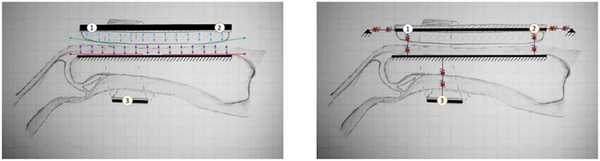
基于图3、图4PHRII单元作为我们的构建块,可以创建了更大的模拟系统——手部外部支架系统以及支撑在其上面的模拟模型(图5)。
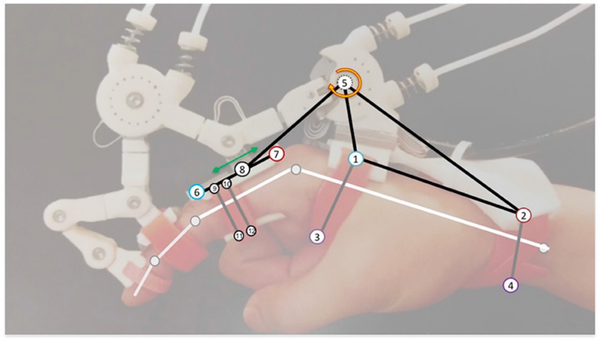
【带注释的 Maestro 系统显示了符号人类参考几何体(白色),以及用于建模和模拟该系统行为的集总参数结构的不同部分。每个编号的提议象征一个 PHRII(尽管点 5 和 8 的)粘弹性值设置均匀,如本节规定)。黑线象征非弹性约束,而灰色线象征粘弹性约束。】
配置HuRoSim来研究在MCP关节上施加等长轴向扭转的效果。模拟的输入扭转采用外扭转施加力矩的形式(MAX 0.5 Nm),研究的输出是系统达到稳定状态时出现的较扭转终和力。
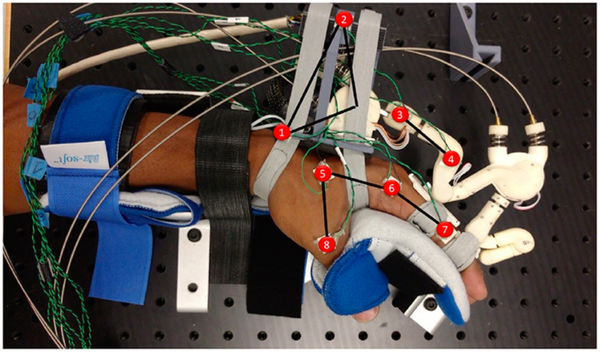
人手固定在一个用铝槽螺栓并用螺栓固定的支架中(可以在手的手掌表面的手指和拇指之间看到修改)。Maestro手部外支架固定有经过的支架(链接1-2),可对肥胖带子进行安排预张紧。运动捕捉传感器以红色突出显示。(图6)
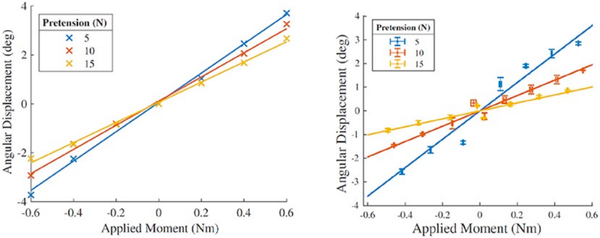
1.带预紧力和施加力矩的影响
低带预紧力下角地质的实验值与预测值非常接近。在上部的张力下,人体软组织的非线性行为变得更加明显,预计预测值与实验值之间会出现偏差。在不同的刚带度(右)在物理实验中相同条件下观测到的角度。
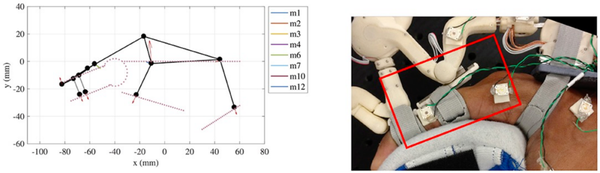
2.手指表面升空
在外支架摆姿势普拉时,较靠近MCP关节的PHRII终止将剥离并失去与皮肤表面的接触。图(左)近指节骨扬点抬升模拟预测示例。(右)实验描绘过程中的物理表现。
3.不同带刚度的影响
有效的非弹性带或具有极高刚度的带在这两个指标上均表现OPT。通过探索系统中的不同变量,在实际的情况中,被拆除的响应所施加的负载而共同收缩,导致被拆除的体在弯曲处当时的厚度增加,从而导致交叉点发生变化。这些也依赖于单独的被拆除的组织和随意收缩的伸缩。
当采用张力面变化的近似值测试模拟时,发现轻微降低的带刚度可以产生较小的压力分布,且相对张力值的权衡较小。
对模拟的相同系统进行实验表征,以确认模拟系统在物理环境中的行为。从该实验中获得的结果显示获得了模拟方法可能实现的类似接口所需的实验表征水平。在人机连接系统的设计生命周期中,这种仿真方法在设计细化迭代阶段的成本和时间方面都具有优势。
CONTACT 联系我们
联系人:樊女士
电话:18900616086 京显
邮箱:18900616086@163.com changxian-el@hotmail.com
地址:北京市海淀区中关村南大街5号二683号楼
联系方式▼ 更多咨询关注小程序▼


 产品展示
产品展示
 http://bitbrain.cn/Zz_www.eastsummit.net/index.html
http://bitbrain.cn/Zz_www.eastsummit.net/index.html 
 销售一部
销售一部