产品中心


OPTOMOTIVE相机Velociraptor EVo
- 品牌名称:OPTOMOTIVE
- 规格型号:Velociraptor EVo
- 产品资料:OPTOMOTIVE相机Velociraptor EVO.pdf
Velociraptor EVO是一款高度可定制且支持用户编程的FPGA高速智能相机:这款FPGA相机搭载了超大尺寸的赛灵思Spartan-6 FPGA与高速成像传感器。其基于GigaBee模块设计,集成双通道DD3内存及千兆以太网接口。其融合了好性能的系统级芯片(SoC)技术与新涡轮增压工业级CMOS成像传感器。
Velociraptor EVO提供完全可定制且用户可编程的开放式参考设计,适用于高速FPGA相机及应用开发系统。其核心在于开放式软硬件开发模型,支持高帧率、实时图像处理、超大FPGA及现代图形用户界面。
一套由中端、多功能及大型Xilinx Spartan-6LX150FPGA组成的系统用于实时算法开发与数据处理。图像采集通过AMS传感器实现,包括CMV2000(2048x1088像素,2/3英寸规格)或CMV4000(2048x2048像素,1英寸规格)。该传感器运行速度极快,每秒可输出高达7.68亿像素,全帧模式下可实现333帧/秒(CMV2000)和178帧/秒(CMV4000)的帧率。板载2x128MB DDR3内存提供2x1.6GB/s带宽,支持复杂缓冲图像处理。采用专为本相机开发的基于UDP的以太网协议与PC通信。相机支持以太网供电(IEEE 802.3at PoE),功耗高达10W。
Velociraptor EVO相机适用于严苛应用场景,可同时满足高速、高帧率需求,并具备实时图像处理能力及适配特定产品或系统的能力。
Velociraptor EVO专为寻求可适配特定产品或系统的原始设备制造商(OEM)设计。迅猛龙EVO相机提供灵活的核心功能框架,可作为多模态功能的平台。该框架具备可扩展性、可扩展性和灵活性,能够适应新算法,并与现有系统互操作。简而言之,它在所有可能方面都兼具多功能性和经济性。
高速成像与实时处理
高帧率与全局快门结合,适合捕捉快速运动目标,如工业生产线上的产品检测、激光三角测量中的三维轮廓扫描。
FPGA可实现图像预处理(如滤波、二值化、ROI提取),降低数据传输带宽需求,提升系统响应速度。
可定制化与扩展性
用户可通过FPGA编程实现自定义算法,例如缺陷检测、目标跟踪、3D重建等。
支持多相机同步触发,适用于需要多视角协同的复杂场景。
灵活的ROI设置
用户可定义感兴趣区域(ROI),仅传输关键数据,进一步优化带宽利用率。
|
产地 |
斯洛文尼亚 |
|
有效像素(水平×垂直) |
2048×1088 |
|
成像传感器 |
CMOSIS |
|
分辨率(百万像素) |
2.2 MP |
|
光谱选项 |
单色 |
|
光学格式 |
12.7毫米(2/3英寸) |
|
有效像素(水平×垂直) |
5.5微米 |
|
帧率(FPS) |
331帧/秒 |
|
动态范围 10位/12位 |
60 dB |
|
模数转换器分辨率 |
10位 |
|
模拟增益 |
1 - 3.2倍 |
|
感兴趣区域 |
支持,8像素增量 |
|
快门类型 |
电子全局快门 |
|
快门时间 |
210纳秒 – 90秒 |
|
像素时钟频率 |
760 MHz(8像素@95 MHz) |
|
曝光模式 |
线性/三斜率高动态范围 |
|
像素校正 |
死像素校正与可编程LUT |
|
触发模式 |
自由运行/触发/重叠/脉宽 |
|
触发特性 |
延迟0-1000毫秒/低通滤波1.5Hz-100kHz |
|
快门分辨率 |
21 ns |
|
FPGA |
Spartan6LX150 |
|
FPGA闲置率 |
高达70%,180个DSP片段中大部分可用 |
|
易失性存储器 |
2×128 MB DDR3 SDRAM |
|
非易失性存储器 |
8MB闪存 |
|
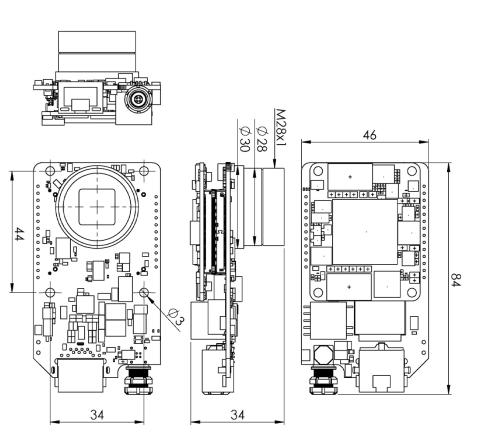
镜头卡口 |
C卡口(1英寸32G螺纹) |
|
工作温度 |
0 - 50°C |
|
质量 |
50克(裸机)/290克(含外壳) |
|
防护等级 |
外壳防护达IP67 |
|
外壳材质 |
CNC加工铝合金,特殊OptoMotive蓝色阳极氧化处理 |
|
RoHS |
符合RoHS标准 |
|
安装孔位 |
4个M3螺孔(裸机)/2个M6螺孔(含外壳) |
|
输入电压 |
以太网供电,42-57V |
|
功耗 |
高达10W |
|
IO隔离 |
无(但摄像头具备1.5kV PoE隔离) |
|
接口 |
RJ45、4针LEMO EXG 00 304 |
|
板载图像处理 |
可选(需集成IP内核) |
|
开放式参考设计 |
是 |
|
开放式架构 |
是 |
|
软件 |
兼容OptoMotive EVO软件(含完整源代码) |
|
操作系统 |
Windows 7、Windows 10(64位或32位) |
|
开发工具 |
Xilinx ISE/EDK 13.3及以上版本,Microsoft Visual Studio 2010 |
- 工业过程自动化——用于计数、检测、检查、验证、读取、检验和测试各类产品、液位、组件等;
- 工业质量控制——用于检测缺陷、裂纹或表面瑕疵、尺寸、位置、规格与颜色、异物及质量;
- 太阳能电池板检测——用于检测晶圆、表面缺陷、玻璃等;
- 普通研发。



 苏州长显
苏州长显