产品中心


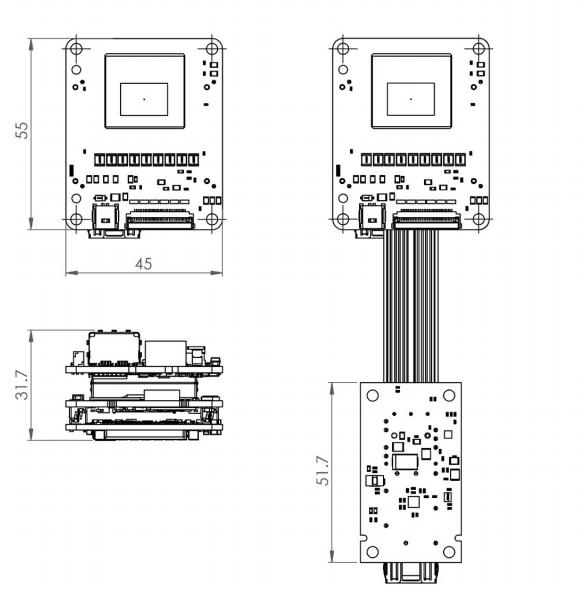
OPTOMOTIVE相机Spinosaurus LX EVO
- 品牌名称:OPTOMOTIVE
- 规格型号:Spinosaurus LX EVO
- 产品资料:OPTOMOTIVE相机Spinosaurus LX EVO.pdf
Spinosaurus LX EVO是一款高度可定制且支持用户编程的FPGA高速智能相机,作为FPGA相机,其搭载了赛灵思Zynq FPGA、高速成像传感器及10千兆以太网接口。该设备融合了高性能ARM系统级芯片(SoC)技术与涡轮增压工业级LUXIMA成像传感器。
凭借高性能FPGA系统级芯片(SoC)技术,Spinosaurus LX EVO相机为计算机视觉开辟了全新维度。这款全局快门工业相机具备惊人的帧率表现与开放式FPGA架构,依托其FPGA处理能力,图像处理算法可在相机端实时运行。Spinosaurus LX EVO为高速FPGA相机及应用开发系统提供了完全可定制且用户可编程的开放式参考设计。其核心优势在于:开放式软硬件开发模型、高帧率、基于FPGA的实时图像处理,以及PC端现代图形用户界面支持。
一套适用于赛灵思ZynqUltrascale+ SoC FPGA的多功能高性能工具,用于实时开发算法和处理数据。图像采集采用Luxima LUX2810传感器,配备32通道LVDS接口(29 Gbps),可在高速度下实现卓绝成像效果。板载2GB LPDDR4内存提供19 GB/s带宽,支持复杂缓冲图像处理操作。
该参考设计可通过标准的Xilinx Vivado工具轻松编辑。OptoMotive定制IP核可无缝集成于Xilinx Vivado工具链中。FPGA(可编程逻辑)的大部分区域可自由用于新算法的编程开发,或额外IP核的实现。该1.2 GHz四核ARM Cortex A53可编程子系统运行Linux操作系统,搭载定制EVO控制与流媒体协议栈(含零拷贝TCP/IP协议栈)。系统级芯片还集成双600MHz Cortex R5处理器,可自由用于用户数据处理。现有设计可轻松集成用户应用程序或定制数据后处理功能。
- 分辨率:300万像素(2112 x 1432);
- 帧率:934帧/秒;
- 传感器规格:1英寸CMOS;
- 像素尺寸:6.6微米;
- 传感器:高速工业级Luxima LUX2810传感器,彩色(拜耳滤色片)与单色版本;
- 接口:10千兆以太网SFP+模块实现高速数据传输;
- 可编程与可重构FPGA,搭载四核ARM处理器的Zynq Ultrascale+架构。
|
产地 |
斯洛文尼亚 |
|
有效像素(水平×垂直) |
2112×1432 |
|
成像传感器 |
LUXIMA |
|
分辨率(百万像素) |
3.0 MP |
|
光谱选项 |
彩色 |
|
光学格式 |
16.84(1英寸) |
|
有效像素(水平×垂直) |
6.6微米 |
|
帧率(FPS) |
778帧/秒 |
|
动态范围 10位/12位 |
54 dB |
|
模数转换器分辨率 |
12位 |
|
模拟增益 |
1x-8x(1倍增量) |
|
感兴趣区域 |
支持,16像素增量 |
|
快门类型 |
电子全局快门 |
|
快门时间 |
5微秒 – 90秒 |
|
像素时钟速度 |
2.4 G像素/秒(No.1版:16像素@150 MHz);2.88 G像素/秒(第3版:16像素@180 MHz) |
|
曝光模式 |
线性曝光,双增益高动态范围 |
|
像素校正 |
坏点校正与可编程查找表 |
|
触发模式 |
自由运行、触发、重叠、脉宽触发 |
|
触发特性 |
延迟0–1000毫秒,低通滤波器1.5Hz–100kHz |
|
快门分辨率 |
1.56微秒 |
|
FPGA |
赛灵思Zynq Ultrascale+ ZU4CG |
|
可用FPGA资源 |
高达50%,728个DSP切片中大部分可用 |
|
易失性存储器 |
2 GB LPDDR4,带宽9.6 GB/s |
|
非易失性存储器 |
64 MB QSPI闪存,8 GB eMMC |
|
镜头接口 |
C型接口(1英寸32G螺纹) |
|
工作温度 |
0 - 50°C |
|
质量 |
待定 |
|
防护等级 |
带外壳时高达IP67 |
|
外壳材质 |
CNC加工铝合金,阳极氧化处理 |
|
RoHS |
符合RoHS标准 |
|
固定孔 |
4个M3 OEM规格 |
|
输入电压 |
DC 9-36V 或 5V(OEM定制) |
|
功耗 |
高达30W |
|
IO隔离 |
3路输入/3路输出光电隔离 |
|
接口 |
10G SFP+、10针Hirose HR10A、ZIF或OEM接口 |
|
板载图像处理 |
可选配置(需集成IP内核) |
|
开放参考设计 |
是 |
|
开放架构 |
是 |
|
软件 |
兼容OptoMotive EVO软件(含完整源代码) |
|
操作系统 |
Windows 7、Windows 10(64位或32位) |
|
开发工具 |
Xilinx Vivado/SDK 2018.2及以上版本;Microsoft Visual Studio 2017 |
- 激光三角测量——搭载内置图像处理核心的现成峰值检测器;
- 动作捕捉——搭载内置图像处理核心的现成BLOB检测器或运行长度编码器(RLE);
- 工业流程自动化——以惊人速度对各类产品、液位、组件等进行计数、检测、核查、验证、读取、检验与测试;
- 工业质量控制——检测缺陷、裂纹或表面瑕疵,测量尺寸、位置、规格与颜色,识别异物或评估质量;
- 通用研发领域。



 苏州长显
苏州长显