



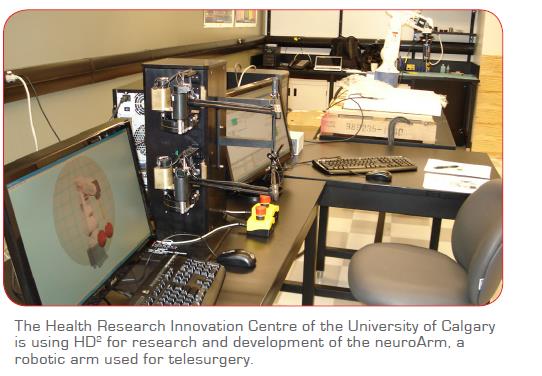
HD²六自由度高精度触觉力反馈装置(HD²6-DOF High Definition Haptic Device) HD²六自由度高精度触觉力反馈装置(HD² 6-DOF High Definition Haptic Device)是高保真六自由度力反馈触觉装置,为高级研究提供力反馈触觉和机器人触觉界面,是非常灵巧的触觉设备。 HD²六自由度高精度触觉力反馈装置(HD² High Definition Haptic Device--6-DOF)允许研究人员使用可编程工具与虚拟或远程环境进行力反馈交互,提供一个独特的大工作空间,超低干预动力。结合QUARC及Quanser的强大的控制设计环境,它为各种行业新兴的应用程序提供了一个灵活的开发测试平台,比如虚拟医学模拟器遥控操作。
HD²高精度触觉力反馈装置(HD² High Definition Haptic Device)
HD²六自由度高精度触觉力反馈装置(HD²6-DOF High Definition Haptic Device)
HD²六自由度高精度触觉力反馈装置(HD² 6-DOF High Definition Haptic Device)是高保真六自由度力反馈触觉装置,为高级研究提供力反馈触觉和机器人触觉界面,是非常灵巧的触觉设备。 HD²六自由度高精度触觉力反馈装置(HD² High Definition Haptic Device--6-DOF)允许研究人员使用可编程工具与虚拟或远程环境进行力反馈交互,提供一个独特的大工作空间,超低干预动力。结合QUARC及Quanser的强大的控制设计环境,它为各种行业新兴的应用程序提供了一个灵活的开发测试平台,比如虚拟医学模拟器遥控操作。
体验真正的虚拟世界的感觉
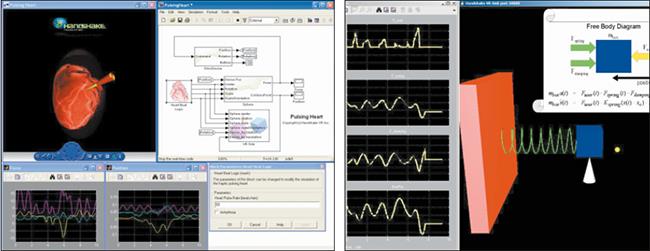
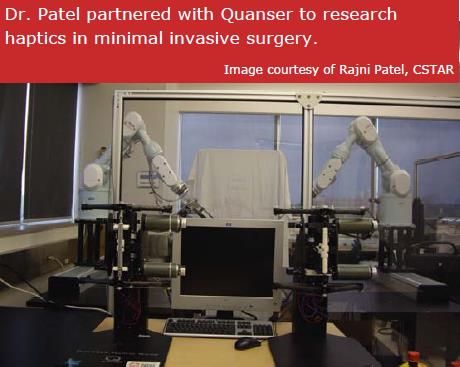
作为一个灵巧的触觉装置,HD2允许研究人员使用可编程工具与虚拟或远程环境进行力反馈交互。相对于其他商用触觉设备,HD²有一个很大的工作空间和超低干预动力。这是高度并行机制使得循环操作形成的摩擦可以忽略不计。重型绞盘驱动器和高性能汽车内的设备减少了惯性,同时保持设备结构的刚度。这种类型的驱动方式也让HD²成为学术界最强大、最 受欢迎的触觉装置。HD²具有非常出色的特性,比如:高分辨率光学编码器,高性能直流电机,精确的运动。这些高标准的特性使得高精度机器人和先进触觉技术实现成为现实,在过去这可能是一种非常巨大的挑战。HD²应用程序潜在的跨度非常大,例如从太空到海底探险,因此高级遥控操作平台的灵活性和高精度是至关重要的。机器人手术,虚拟现实训练模拟器,人类康复系统和高端交互游戏系统其实是集成了HD² High Definition Haptic Device触觉力反馈传感装置的新兴应用。
它是如何工作的?
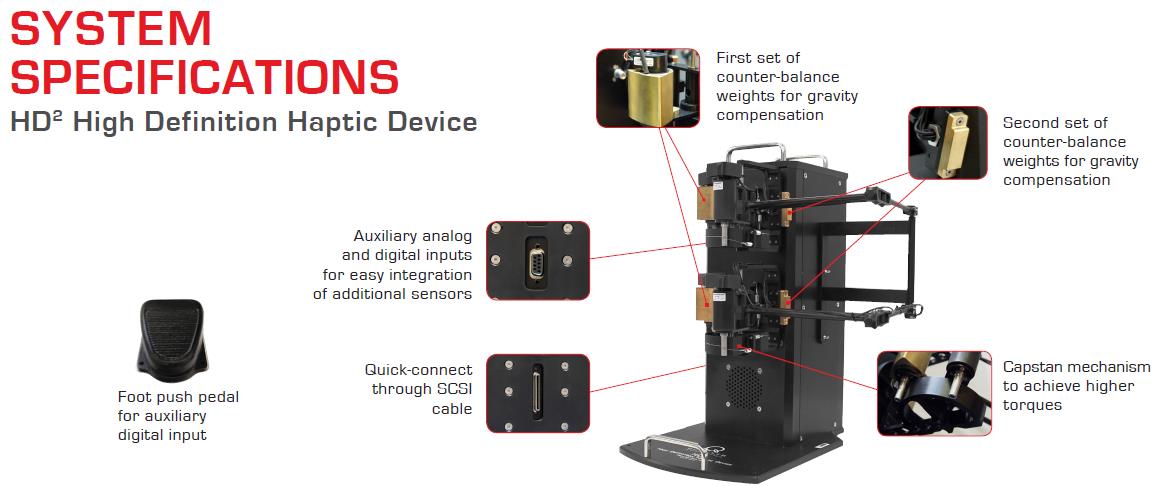
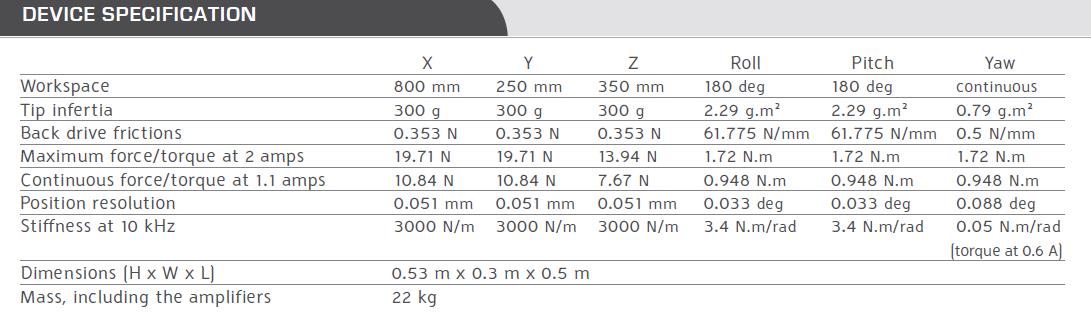
使用七个高分辨率光学编码器,操作员的运动可以在六个自由度( X, Y, Z, roll, pitch ,yaw)方向跟踪。该设备也可以使用户在五自由度( X, Y, Z, roll, pitch)跟踪。为了减少整个工作区的重量,可调配重平衡。这个先进的设备配备了六个内置高带宽线性电流放大器,连同他智能机械设计,能够实现的刚度系数高达20000 N / m。为了方便切换不同应用程序,设置了数字输入面板。该系统利用Quanser公司的QID/QIDe采集卡来连接PC机,兼容 MATLAB®/Simulink® or RCP Toolkit for LabVIEW™的 QUARC软件可以创建一个直观的,非常灵活的控制器设计环境。
HD²六自由度高精度触觉力反馈装置(HD² High Definition Haptic Device)特点:
l 高度可行驶的关节和超低干预动力学
l 低摩擦与低惯性
l 的高刚性结构
l 绞盘传动机制来实现更高的扭矩
l 运用旨在消除重力影响的设计原理
l 辅助模拟和数字输入可用的侧板周边配件
l 可重构处理能够获得不同的工作区
l 高分辨率光学编码器
l 内置线性电流放大器
l 关基于安全运行的
l 紧急停止开
l 通过SCSI线缆轻松连接到数据采集控制板
l 脚踏板推动辅助数字输入
l 兼容Simulink® and MATLAB®软件
参数:
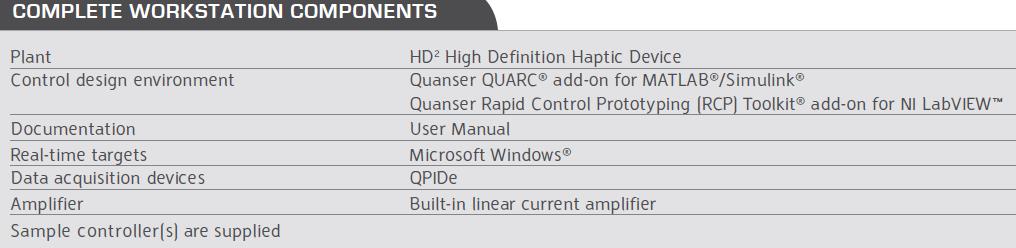
工作站组件:
HD² High Definition Haptic Device 6-DOF高精度触觉装置
QPID/QPIDe 数据采集设备
QUARC实时控制软件(与Matlab/Simulink兼容)
用户手册(电子文档)
应用领域:
适用于触觉技术研究、商业化科研、机器人技术和运动学等领域。
课题及研究题目
l 触摸屏控制
l 阻抗控制/适应性控制
l 主操纵杆/副环境(Reachin API)交互
l 远程操纵功能
l 平行冗余操纵器
l 运动学动力模型/力监测器
l 机器人技术
l 力控制、动作(方位和速度)控制
l 位置及力追踪:自由动作和硬接触
l 多变量控制设计/ PID控制设计
l 状态反馈/不连续时间取样
CONTACT 联系我们
联系人:樊女士
电话:18900616086 京显
邮箱:18900616086@163.com changxian-el@hotmail.com
地址:北京市海淀区中关村南大街5号二683号楼
联系方式▼ 更多咨询关注小程序▼


 新闻资讯
新闻资讯
 http://bitbrain.cn/Zz_www.eastsummit.net/index.html
http://bitbrain.cn/Zz_www.eastsummit.net/index.html 
 销售一部
销售一部