


确定节能步行控制的关键因素基于反射的肌肉骨骼系统的大范围速度补充视频*本文分享实验可访问数据,所有实验数据和编程代码均可在 GitHub 上公开获取,网址为https://github.com/Shunsuke-KK/reflex_plos_revisionhttps://github.com/Shunsuke-KK/reflex_plos_revision。
步行是日常生活中一种最基本的运动模式,但它背后的神经和生化控制机制是人体最复杂的自主控制系统之一。理解人类步态的复杂机制不仅对工程应用有重要意义,如开发能效更高的双足机器人、步态辅助外骨骼和智能假肢等,而且对提升这些设备的用户体验和实用性至关重要。
现有的基于反射的控制系统在精确调节步行速度方面存在显著限制,因为涉及到大量控制参数。为了克服这一挑战,研究人员开发了一种新颖的性能加权最小二乘法(PWLS),设计出一个参数调节器,通过优化控制参数值来维持目标速度的同时,提高步行效率。该研究成功地在二维肌肉骨骼模型中模拟了从0.7 m/s到1.6 m/s的步态。
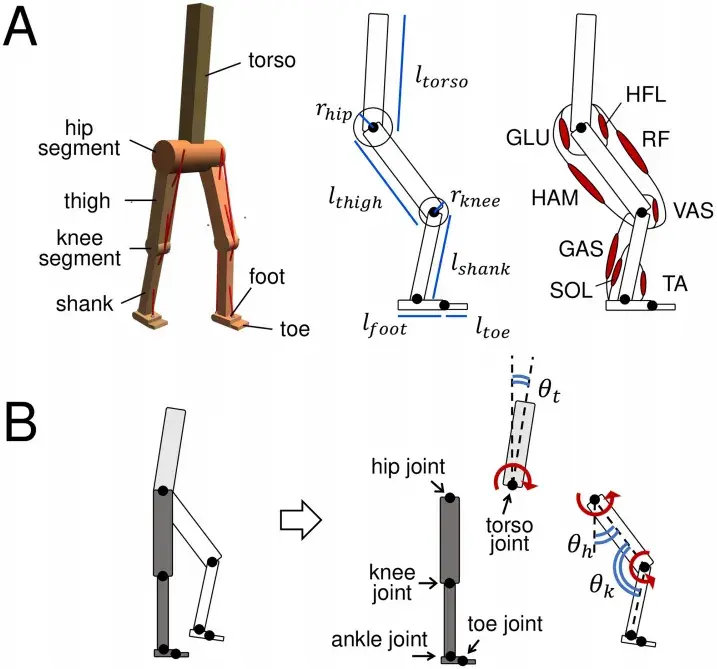
研究团队使用了一个高度为180厘米,重量为80公斤的二维肌肉骨骼模型进行实验。该模型在MuJoCo模拟环境中构建,因为MuJoCo能够在确保物理计算有效性的同时,以相对较低的计算成本进行模拟。
模型包含12个部分:躯干、髋部、两条大腿、两条膝盖、两条小腿、两只脚和两组脚趾,运动限制在矢状面内。每条腿有八个肌肉致动器,反映了臀大肌(GLU)、髋屈肌(HFL)、股四头肌(VAS)、胫前肌(TA)、比目鱼肌(SOL)、腘绳肌(HAM)、股直肌(RF)和腓肠肌(GAS)的肌肉活动。
A. 肌肉骨骼模型的结构左图:MuJoCo 模拟器中双足模型的斜视图中图:带有分段参数的模型侧视图右图:肌肉排列B .模型的内部自由度 θt、θh和θk分别代表躯干关节角度、髋关节角度和膝关节角度。(红色箭头表示关节旋转的正方向。)
1.肌肉执行器模型
肌肉骨骼模型通过模拟生物肌肉的动作来产生关节扭矩,该模型由两部分组成:1)非弹性肌腱;2)收缩肌腱的肌肉。
肌肉执行力 是肌肉长度 、速度 和当前激活水平 的函数。激活水平的范围是 0 到 1.0,激活水平越高,肌肉产生的力就越大。长度 和速度 是按肌肉的平衡长度 0 进行缩放的。
执行器力 计算如下:
在肌肉执行器模型中,力-长度关系 Fl 和力-速度关系 Fv 分别表示肌肉在不同长度和速度下产生的力。被动力 Fp 是无论肌肉是否激活都存在的力。最大等长力 F0 则是每个肌肉执行器在最大激活时产生的力,其数值因不同肌肉而异(如表2所示)。这些数值与以往的研究一致。
肌肉激活水平aa 是根据输入刺激信号 u 计算得出的,范围在 0 到 1.0 之间。
Where
2.基于反射的控制
该控制器基于 Geyer 模型,并结合了额外的控制律来调整目标髋关节角度并固定为脚跟着地做好准备的髋关节和膝关节。控制系统包括三个主要功能:力反馈、长度反馈和肌肉驱动的比例微分 (PD) 控制。1)力反馈:力反馈定律返回刺激信号,
,以响应执行器力 Fi 。在人类中, Fi 的信号来自高尔基腱器官,并通过 Ib 型传入神经传递到脊髓。增益 Gi 是正控制参数,
是缩放的执行器力,(即
),其中包括感知时间延迟Δti。
2)反馈长度:
通过长度反馈,我们计算刺激信号,表示为
,对应于肌肉执行器的长度 li 。该函数模拟肌梭的拉伸反射。目标长度
和增益 G i 是正控制参数。
3)肌肉驱动的比例微分 (PD) 控制:
对于肌肉执行器i ,它在正方向上向关节 θj 施加扭矩,
为:
相反,对于在负方向上施加扭矩的肌肉执行器 i ,
为:
其中,比例增益 Ki 和微分增益 Di 是正控制参数。
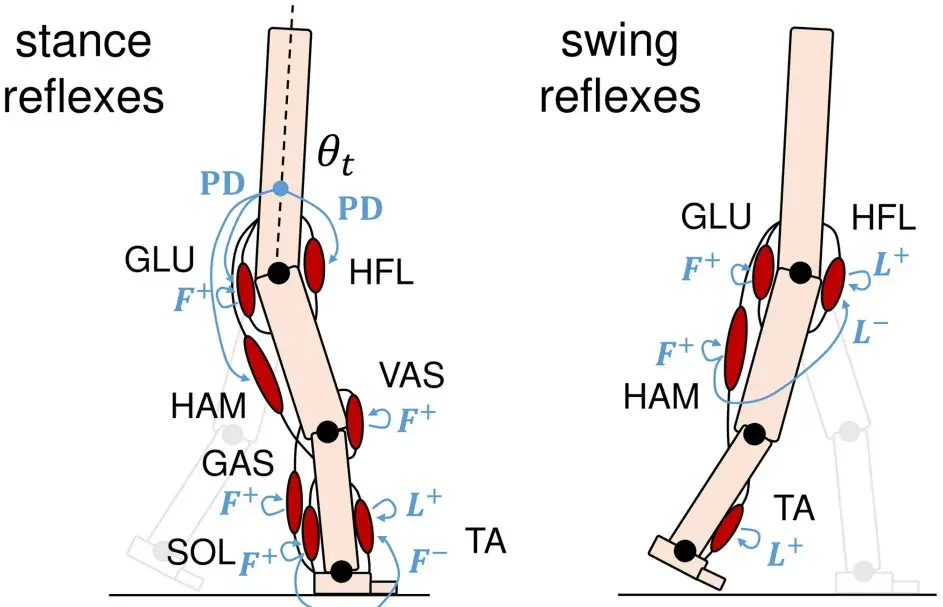
F表示力反馈,L表示长度反馈,PD 表示肌肉驱动的 PD 控制。+ 和 − 分别表示正反馈和负反馈。
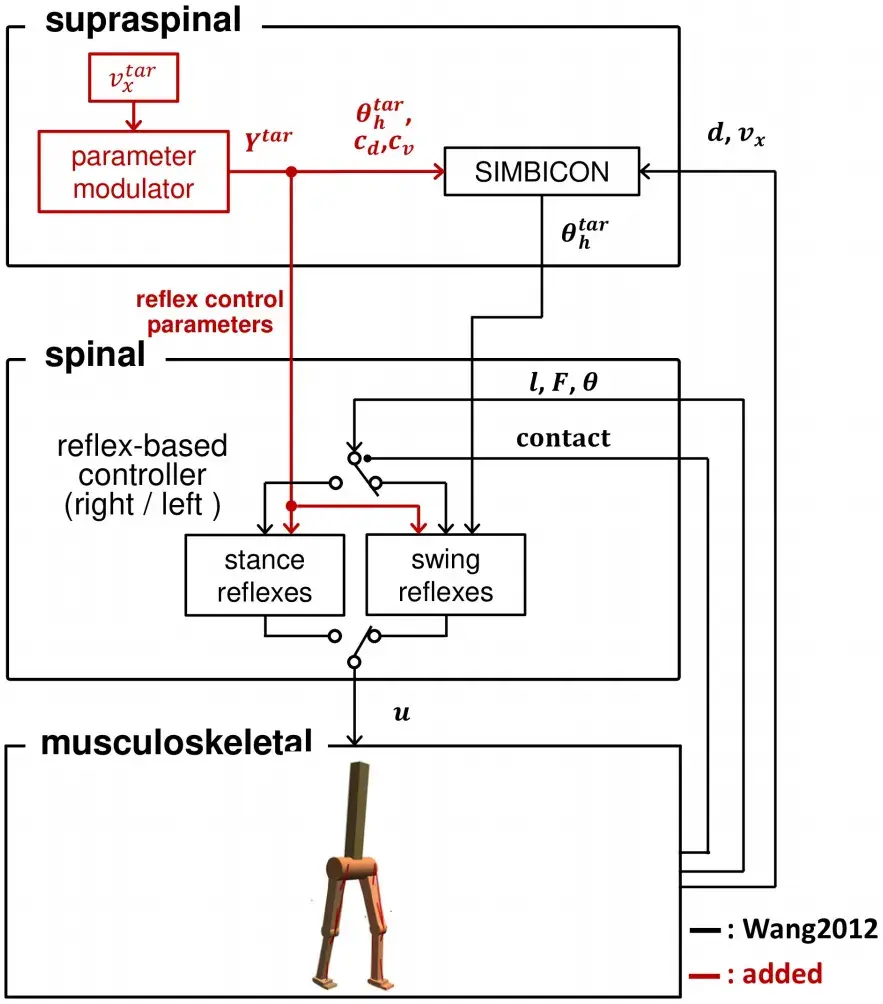
肌肉骨骼模型由激活的肌肉驱动,这些肌肉接收来自脊髓层中基于反射的控制器的刺激信号u。每条腿(右腿和左腿)由单独的站立和摆动反射控制。控制律根据腿是否接触地面而切换。来自模型的传感信息反馈给控制器以产生运动。脊髓上层控制步行速度并调整所需的脚部位置。
1)优化控制参数:
多项式回归数据集通过逐步改变目标速度进行优化收集,总共有 56 个控制参数。使用协方差矩阵自适应进化策略 (CMA-ES) 算法优化这些参数,该算法适用于非线性和非凸优化问题。在该算法中,独立的 λ 搜索点从多元正态分布中采样,
在每一代中,g:
Y表示反射控制参数集,m ( g )表示第g代搜索分布的平均值,σ ( g )表示第g代的步长,C ( g )表示第g代的协方差矩阵。目标成本函数 f 设计基于之前的研究:
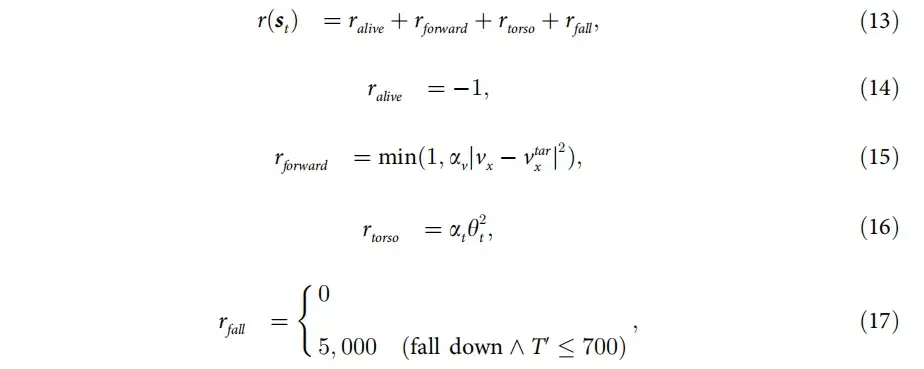
其中,st表示由控制参数集 Y 确定的时间步 t 处的模型状态,r表示状态st的奖励函数,αE表示权重系数,CoT 表示运输成本 。奖励函数r定义如下:
其中ralive可防止模型跌倒。rforward 表示当前水平行走速度 vx 与目标速度之间的差异的惩罚,
,下限为 -1。rtorso用于保持躯干直立。
f 中的αE (CoT − 0.3)表示在试验结束时增加的能量成本。
其中,J表示总代谢能量,M表示模型质量,g表示重力加速度,Δd表示行进距离。J的计算方法是将所有肌肉消耗的总代谢能量相加。
2)多项式回归的数据集收集:
该研究并行运行两个程序,以便高效收集数据。
一个程序从目标速度 1.3 米/秒开始逐渐增加,另一个程序从 1.2 米/秒开始逐渐减少,初始控制参数相同。控制参数 Y 针对每个目标速度进行优化,生成步态。
当目标速度改变时,优化参数被重置,部分变量保留。如果模型在评估试验中保持行走,速度、控制参数和 CoT 会被添加到数据集中,数据集按速度排序。
3)PWLS(性能加权最小二乘法):
与计算总平方误差时对数据点进行无偏处理的普通最小二乘法不同,PWLS 从有偏的数据集中推导出多项式函数。因此,它为性能更高的数据点分配更大的权重,以通过回归强化节能步行。
PWLS 类似于加权最小二乘法。加权最小二乘法是处理异方差数据时使用的多项式回归算法,这意味着测量点之间的方差不是常数。导致观测值方差的变量被纳入其中,以加权每个数据点。在该项研究的 PWLS 中,每个数据点根据其性能而不是导致异方差的因素进行加权。
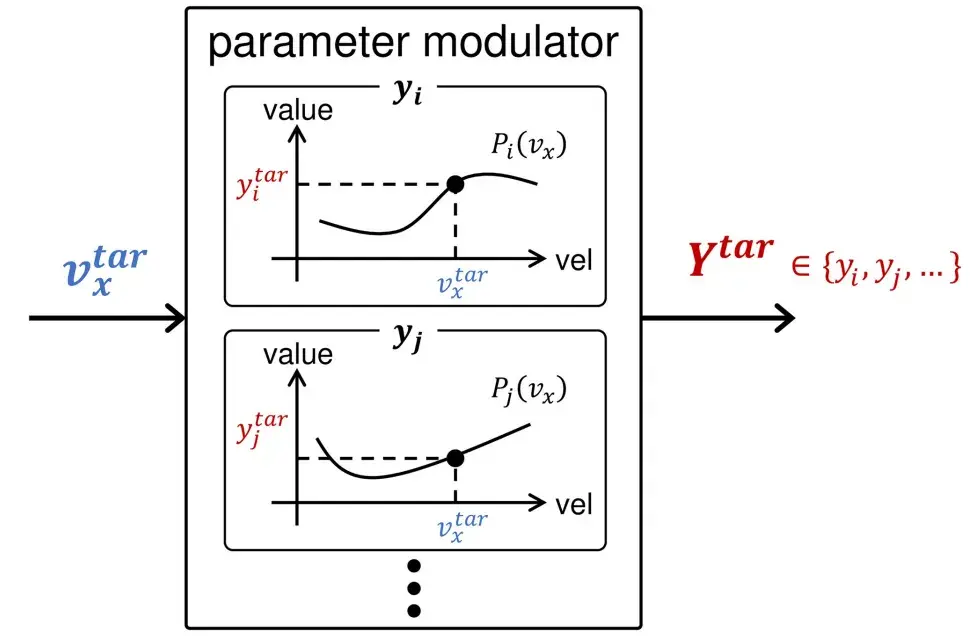
每个控制参数,
通过m次多项式函数 Pi ( vx )(图4)对输入速度 vx 进行调制,如下所示:
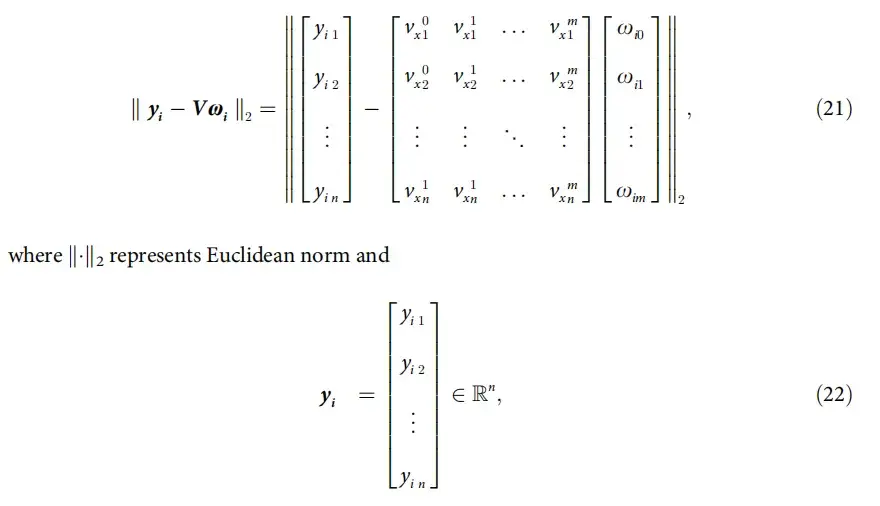
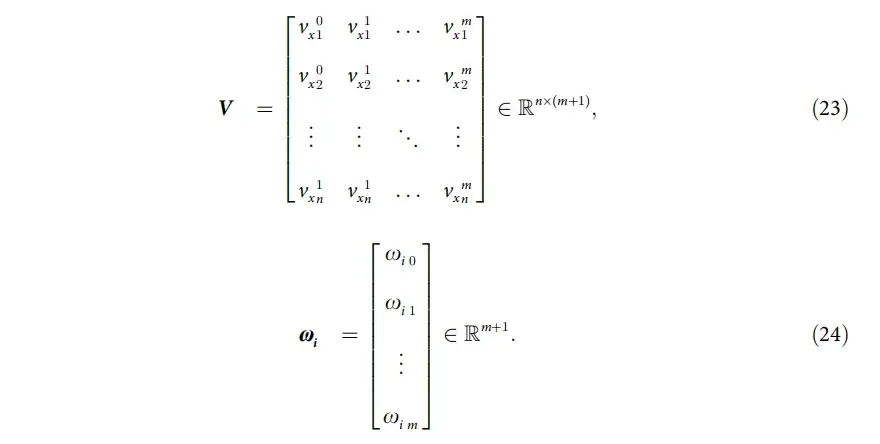
其中ωij是使用 PWLS (新提出一种多项式回归算法)计算出的系数,可最小化数据点的总平方性能加权误差。假设收集到的数据集中每个控制参数有 n 个数据点,{( vx1 , yi1 ), …, ( vxn , yin )},{( vx1 , Y1 , CoT1 ), …, ( vxn , Yn , CoTn )}。yi 与 Pi 得出的预期值之间的总误差可以用矩阵形式表示为:
随后,每个误差的权重为其中β=[β1,····βn]T∈Rn,其中βi表示相应数据点i的评估性能值,值越高表示数据越有利。总性能加权误差:
其中 ⊗ 表示 Hadamard 积,它取两个相同大小的矩阵并返回一个矩阵,其中每个元素都是原始元素的乘积。EPWLS是等式 (25)的平方,
EPWLS关于 ωi 的偏导数为
其中,B为n × ( m +1) 矩阵,沿横轴 展开β ,定义如下:
当EPWLS达到最小值时
因此,PWLS 的目标是求解关于ωi 的方程 (31)。结合方程 ( 29 ) 和 ( 31 ) 可得
利用性质 ( U V ) T = V T U T,公式 (33)可重写为
这里,等式 (36)中的 β ⊗ V ωi 可以重新表述如下
将公式 (37)代入公式 (36),得到
因此, Pi中的多项式系数ωi可按如下方式计算:
4)权重参数β的设计:
β i ∈ β是在 PWLS 中评估的性能,用于加权相应的数据i。
由于数据集 {( vx1 , Y1 , CoT1 ), ..., ( vxi , Yi , CoTi ), ..., ( vxn , Yn , CoTn )} 按速度排序,因此第j个数据点周围的平均 CoT ,
,计算如下:
M设置为 125,得出 2 M + 1 = 251,这约是数据集中收集的控制参数集的 0.5%。使用第i个数据点周围的平均 CoT 值,
,我们定义数据i的权重βi如下:
其中A ≥ 1 表示常数。βi > 1 表示数据被评估为有利数据,βi < 1 表示数据被评估为不利数据。
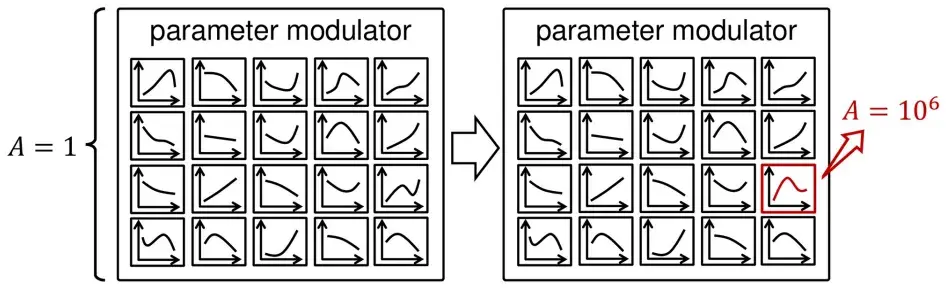
参数A决定了对更高性能数据点的偏向强度,即A值越大,对有利数据的偏向越大。
5)PWLS简单应用示例:
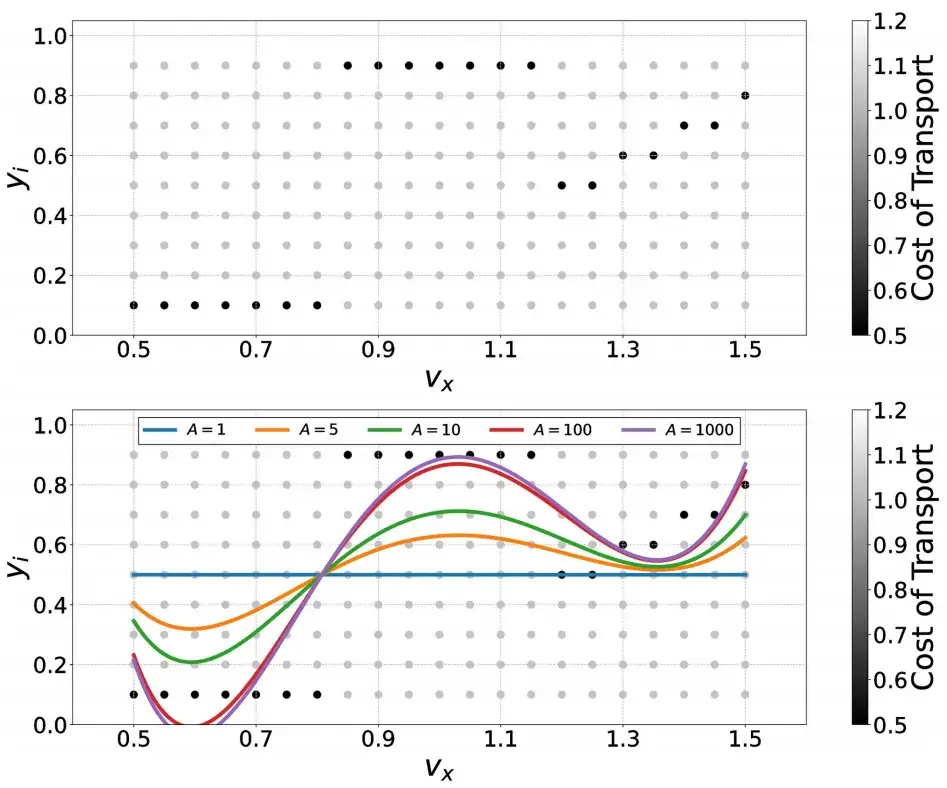
上图:准备好的数据集包含 18 × 9 个数据点,每个数据点都通过 CoT 进行评估。黑色数据点表示较低的 CoT 值 0.5(高效),而灰色数据点表示较高的 CoT 值 1.0(低效)。
下图:计算出的回归曲线,多项式次数设置为 6。
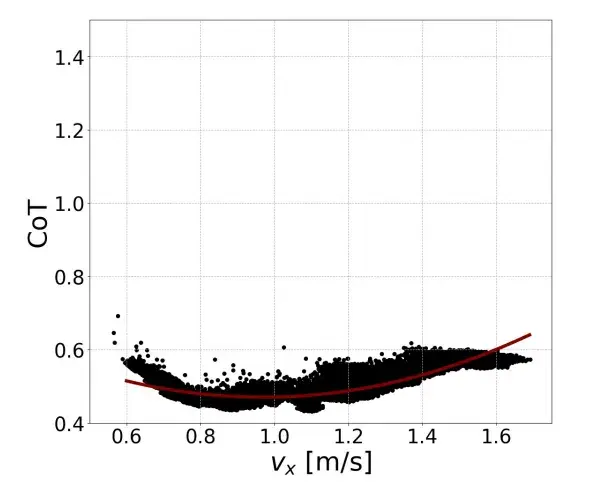
优化过程设置了每次试验时间为 5000 步,使用特定的权重系数。数据通过两个并行程序收集,分别从不同的初始速度开始,经过 102,000 次评估试验。CMA-ES 的超参数设置为σ 0 = 0.1 和 μ = 7,数据收集耗时三天。结果显示步行速度和 CoT 关系类似人类步行,使用多项式次数为 6 的模型来生成步态。
CoT 速度值可以用二次曲线(红线)来近似。
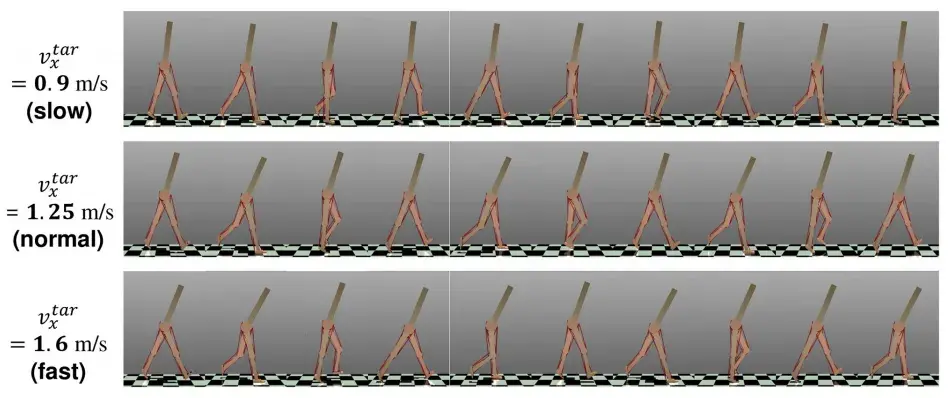
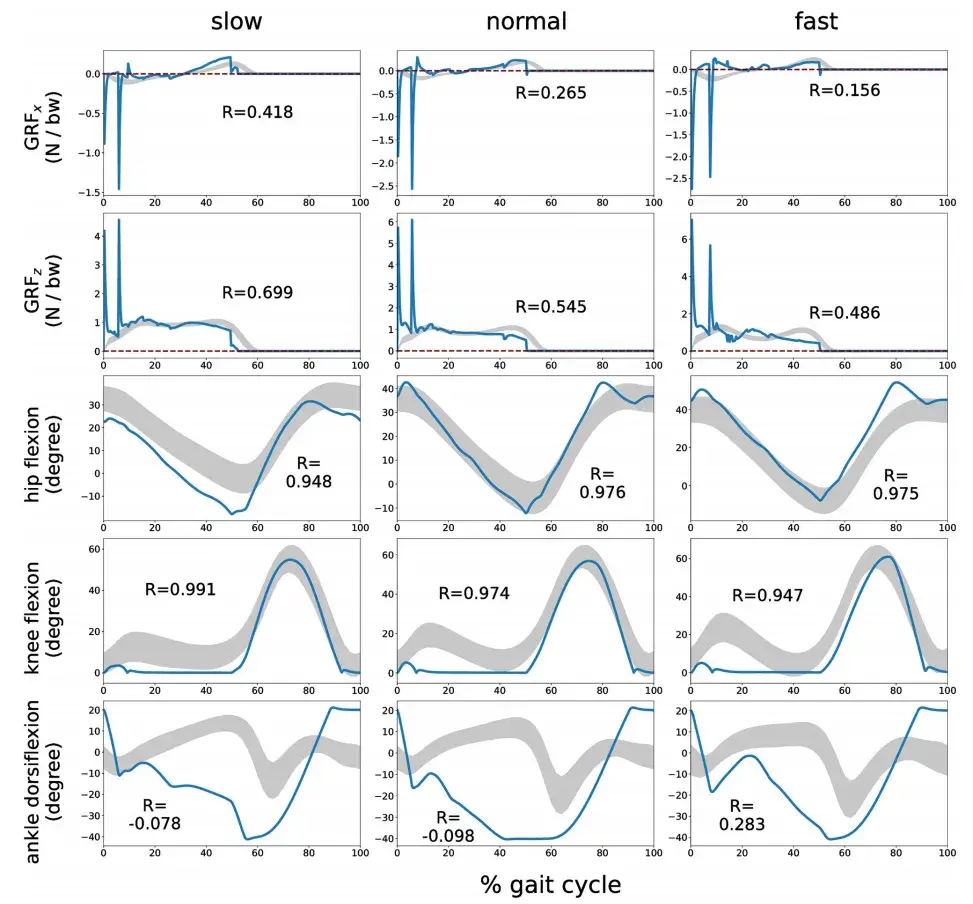
1)生成的步态
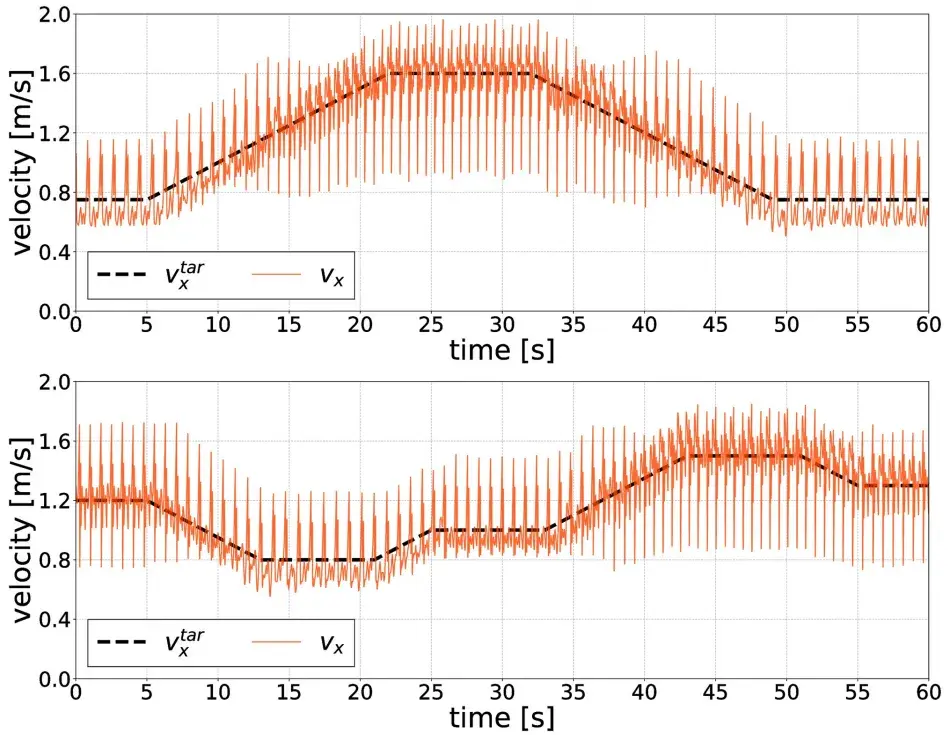
蓝线表示生成的步态,灰线表示人类的步态(平均值±1 sd)。GRF 值根据体重进行归一化。R表示互相关值。2)速度控制
上图:准备好的数据集包含 18 × 9 个数据点,每个数据点都通过 CoT 进行评估。黑色数据点表示较低的 CoT 值 0.5(高效),而灰色数据点表示较高的 CoT 值 1.0(低效)。
下图:计算出的回归曲线,多项式次数设置为 6。
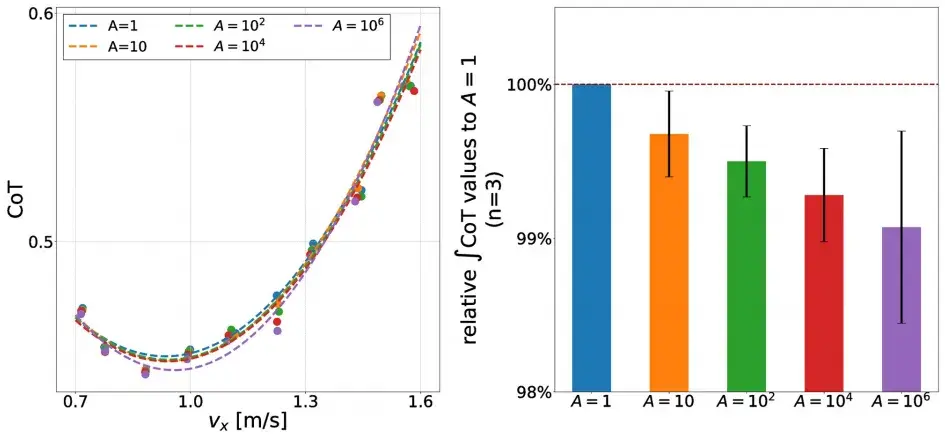
左图:具有不同A值的生成步态的估计 CoT 曲线。
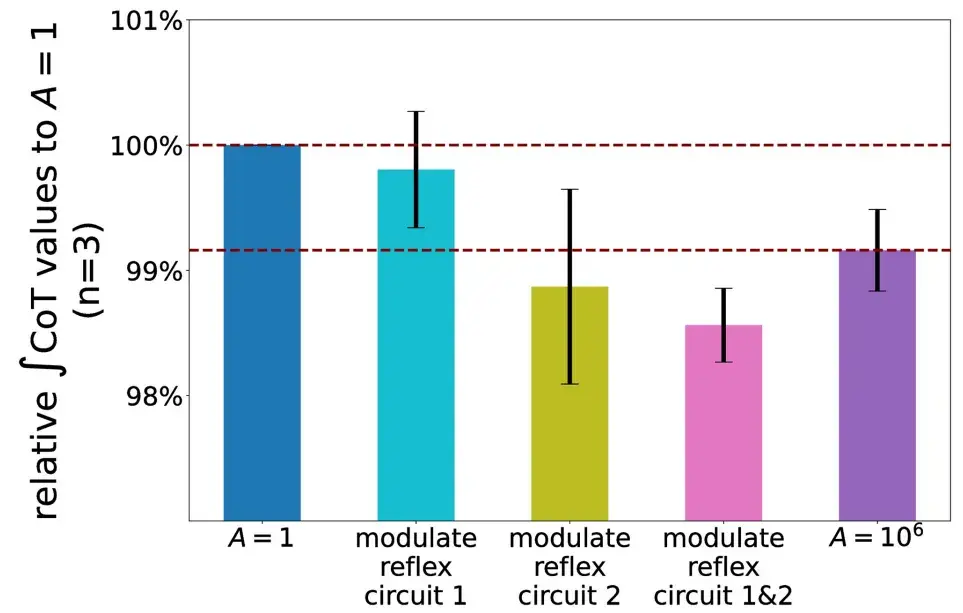
右图:具有不同A值的生成步态的相对 ∫CoT 值( n = 3)。
A = 1的生成步态是基线。
∫CoT 是从下限速度(=0.7 m/s)到上限速度(=1.6 m/s)的估计 CoT 曲线的积分。
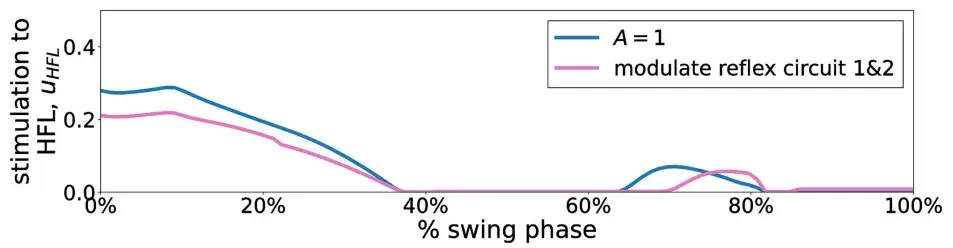
左:替换前,所有函数均以A = 1 导出。右:仅将目标控制参数函数(红色)替换为A = 106。
其他参数的函数均未被替换。
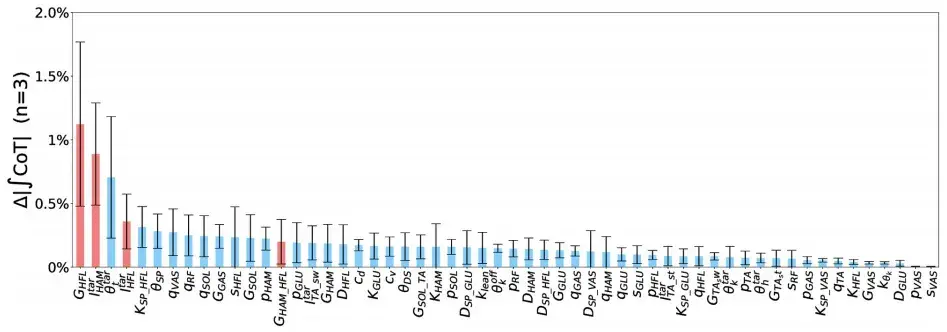
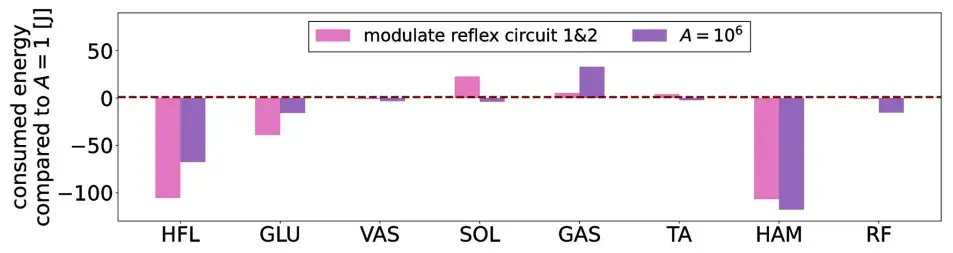
当每个参数的优化函数代入A = 106得出的函数时,∫CoT 值的绝对变化,其中A = 1(n = 3)。
红色条表示与焦点反射电路相关的控制参数。
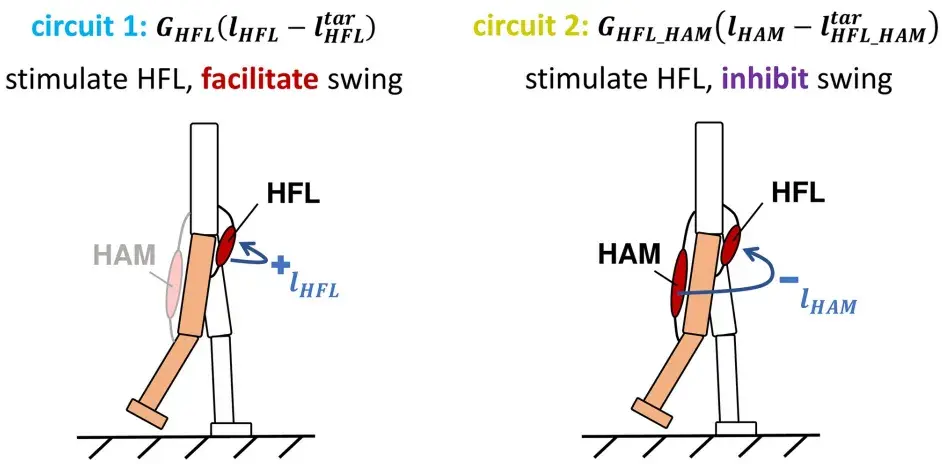
这两个反射电路仅在摆动期活跃。
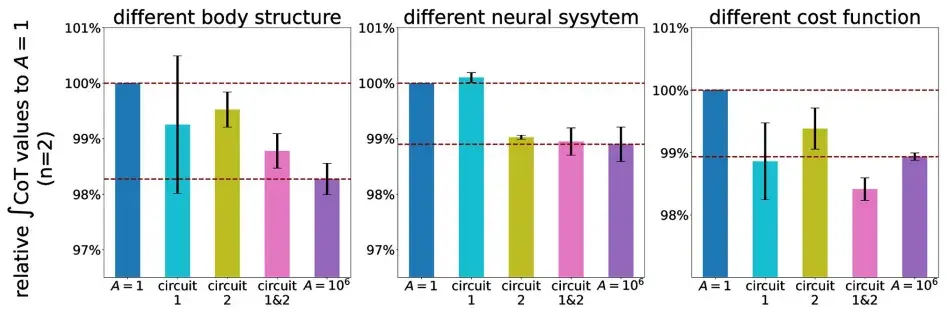
这张图展示了在调节反射电路 (n = 3) 时,相对于基准值 A = 1 的步行 ∫CoT 值的变化。图中用不同颜色条表示不同的优化条件和参数对步态的影响。具体来说:
在不同的身体结构设置中,模型的节段长度缩短了 20%。在不同的神经系统设置中,传感信息到控制器的时间延迟加倍。
研究人员研究了基于反射的控制系统在不同速度范围内的能量效率维护机制,并成功设计出一个能够根据目标速度进行调节的参数调节器。
希望这篇文章能够激发大家对人因工程领域的兴趣,并为相关研究提供有价值的参考。如果你对步态分析和人体建模感兴趣,欢迎继续关注我们,获取更多有趣的研究分享!
CONTACT 联系我们
联系人:樊女士
电话:18900616086 京显
邮箱:18900616086@163.com changxian-el@hotmail.com
地址:北京市海淀区中关村南大街5号二683号楼
联系方式▼ 更多咨询关注小程序▼


 产品展示
产品展示




































 http://bitbrain.cn/Zz_www.eastsummit.net/index.html
http://bitbrain.cn/Zz_www.eastsummit.net/index.html 
 销售一部
销售一部