


在*早期,工作中的姿势安全测试是由人体工学**使用直接观察和视频记录进行的。但随着时间推移,人们采用了各种方法来评估生产线工作站中WMSD的风险,如快速上肢评估(RULA)。
然而,这些方法有时过于主观,通常只在伤害已经发生时才进行评估。因此,更需要能够帮助人体工学家利用定量数据更频繁地评估工作场所的人体跟踪系统,以提高评估的准确性,并创造更健康的工作环境。
“与工作相关的肌肉骨骼疾病 (WMSD) 是影响肌肉骨骼系统的疾病,由体力工作需求引起或恶化。疼痛和功能丧失是*常见的症状,还可能出现肌肉紧张、肌无力、关节僵硬、活动范围受限、关节不稳定、麻木、烧灼感或刺痛。”
动作捕捉系统可以准确、客观地测量人体运动和姿势。此功能可用于评估工作场所肌肉骨骼疾病的风险,并为评估人体工学干预措施随时间的有效性提供有价值的见解。
基于IMU的身体运动捕捉定制系统可实时获取人体部位方向的数据,并精确计算关节角度。研究表明,这种低成本解决方案越来越适合人体运动估计需求。然而,一些系统*适用于没有铁磁材料的环境,不适合汽车行业的特定工作条件;另一些只提供硬件解决方案,而不涵盖后续的人体工学分析软件。
传感器的正确放置对于基于IMU的上肢和下肢方法都至关重要,因为错误的放置可能导致不一致的测量结果。
在实验***有12个IMU传感器被放置在背部、骨盆、手臂和前臂上,以记录上半身的运动。商业传感器按照制造商的指南放置,而定制传感器则按照特定协议放置在背部、上臂外侧和手腕后部。
IMU系统和软件流程的准确性和可靠性对人机工程学评估结果至关重要。校准和验证程序能够确保工人动作质量和数据一致性。
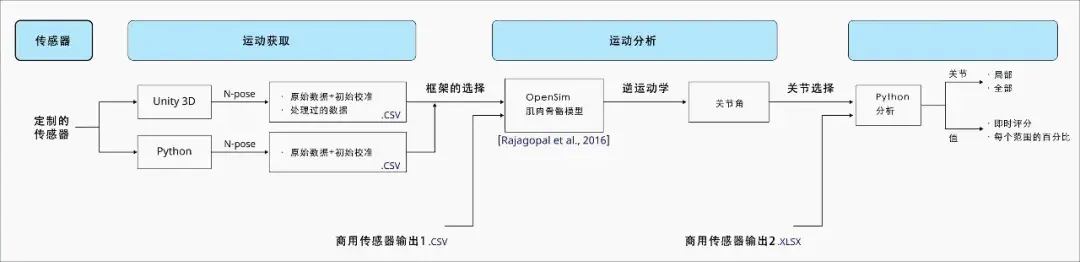
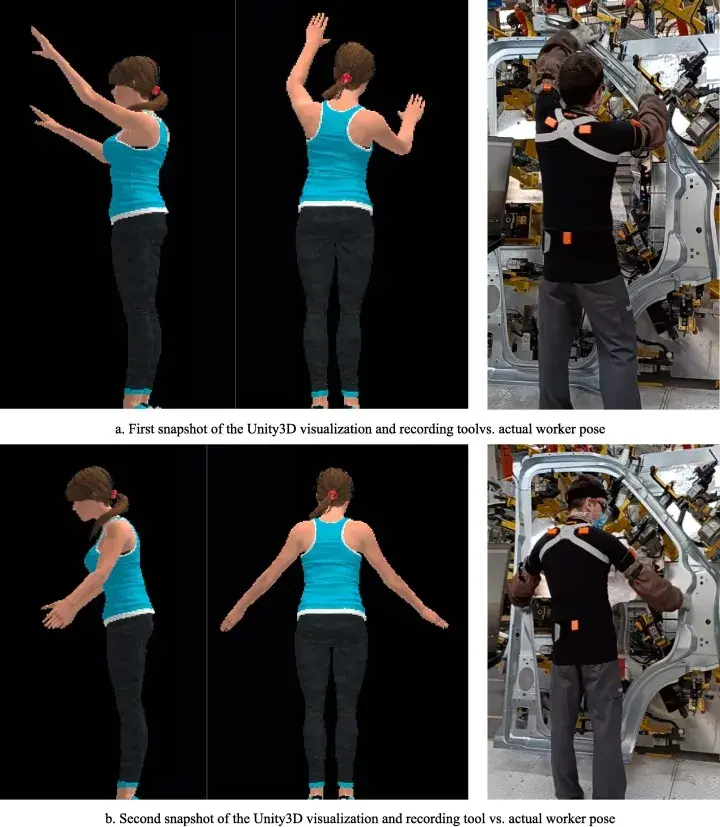
该案例提供双选项捕获软件:一是使用Unity3D表示人体关节运动,二是使用Python实时显示每个传感器的3D方向。这两种解决方案包括记录和校准人体骨骼方向。
在开始测量前,建议对传感器进行航向重置和校准,以初始姿势作为参考。校准期间,传感器的初始方向存储在输出文件中,用于后续的姿态和运动学计算。商业解决方案的输出与我们的实现兼容,只要提供四元数输出和时间戳即可。记录被分割成多个子部分,只有工作人员处于活动状态的帧被传送到下一个模块,以确保*终分析结果准确。在此步骤中,通过重建记录中的化身来视觉选择每个分段的帧。
人体生物力学模型和逆运动学在人体运动研究中至关重要。
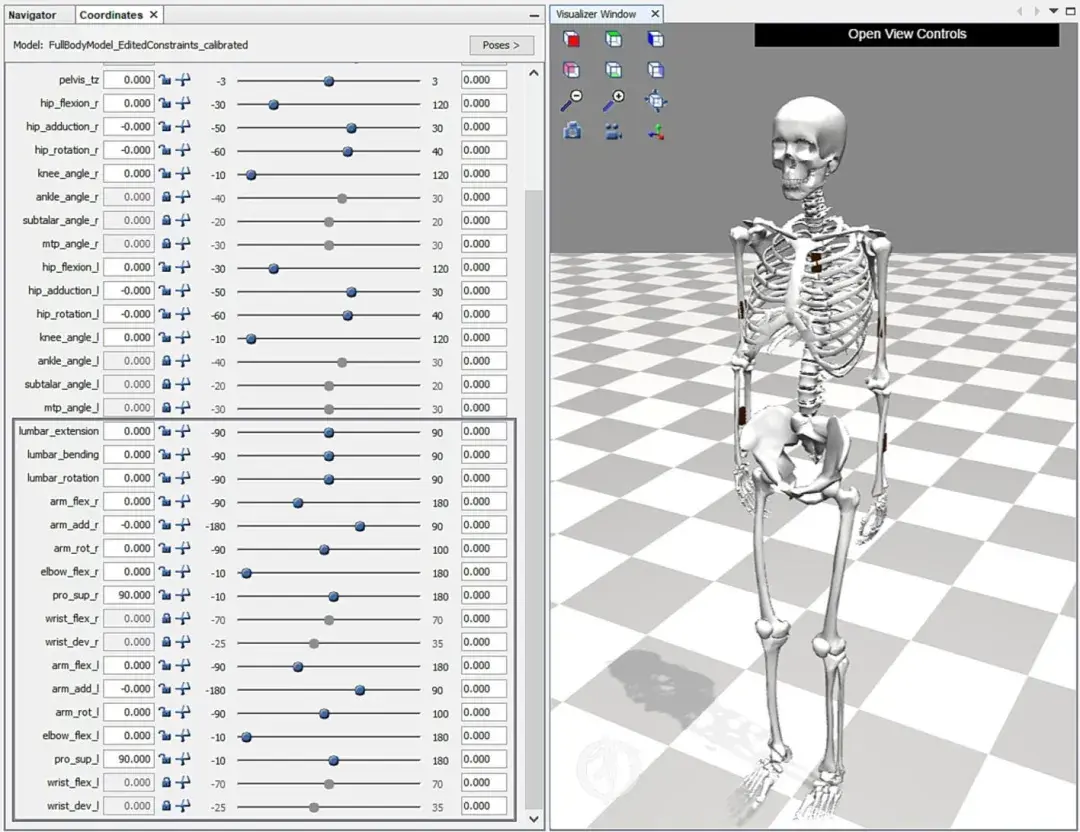
通过逆运动学从传感器数据中推断关节角度,而OpenSim作为开源软件提供了准确建模的能力——记录数据与模型连接,生成动态模拟,并根据受试者的运动范围进行调整。
在案例中,采用Rajagopal2015模型,并通过修改上半身约束进行逆运动学。OpenSim为研究提供了丰富的可能性,被广泛应用于运动学分析。
人体工学分析模块用于评估工人在各种活动中的解剖表现,特别关注不同姿势带来的WMSD风险,以便进行纠正。因此,需要满足以下条件:
研究在西班牙依维柯汽车工厂进行,旨在评估使用RULA方法进行人体工程学评估流程。
受试者为一名右利手男性高级工人,进行常规装配线任务,记录其上半身运动。任务包括组装、拆卸零件和使用手动工具。
实验记录了任务执行的时间,并使用IMU系统和传感器进行数据记录。数据后续通过RULA评分系统进行WMSD风险因素的评估。
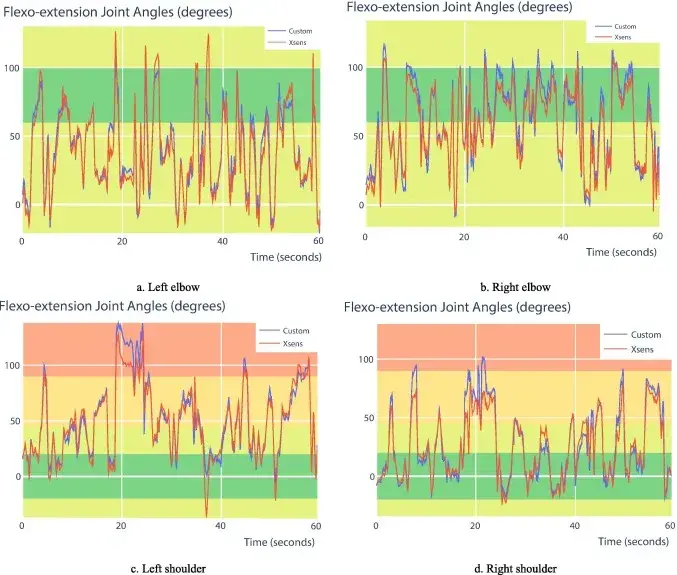
表1中定义的工作站的2个子过程的记录,包括身体右侧和左侧的肘部屈曲-伸展和旋前-旋后,以及肩部的屈曲-伸展和外展。自定义传感器数据被记录到两个不同的文件(R1 和 R2)中。
表1:2个子过程的记录
| 子流程 | Delta-time 自定义记录 | 莫维拉阿温达框架 |
| 1 | R1 → 0:04–1:04 | F210 – 6300 |
| 2 | R2 → 1:28–2:38 | F24760 – 31,760 |
表2:姿势总结
| 子流程G1 | 左肘 | 右肘 | 左肩 | 右肩 |
| 互相关 | 0.958 | 0.971 | 0.961 | 0.955 |
| 均方根误差 | 8.971 | 7.799 | 9.253 | 9.685 |
| 子流程G2 | 左肘 | 右肘 | 左肩 | 右肩 |
| 互相关 | 0.967 | 0.973 | 0.953 | 0.952 |
| 均方根误差 | 9.580 | 7.412 | 8.667 | 11.48 |
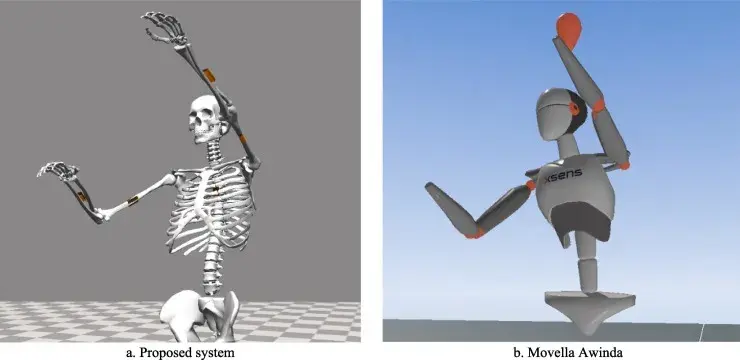
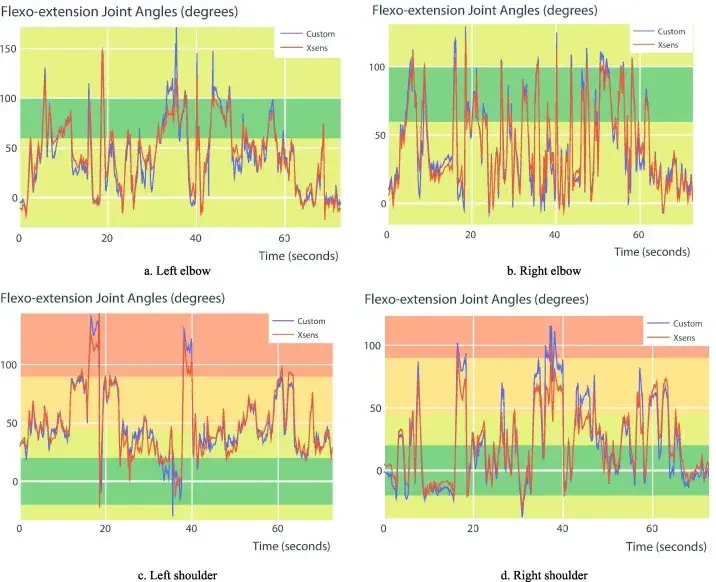
从逆运动学分析可以看出,两个系统(图6和图7)记录的肘关节运动相似,*在某些特定运动上略有不同。*大的角度差异出现在肩关节处(RMSE < 12 度),并且这些差异对于*终 RULA 分数计算并不显着。
两个系统结果的比较考虑了图 1所示的完全自由管道输出与通过我们的 RULA 系统的接头角度的 MVN Analysis Pro 输出,即商业传感器管道的输出 2。
*终的 RULA 分数以两种不同的方式呈现:
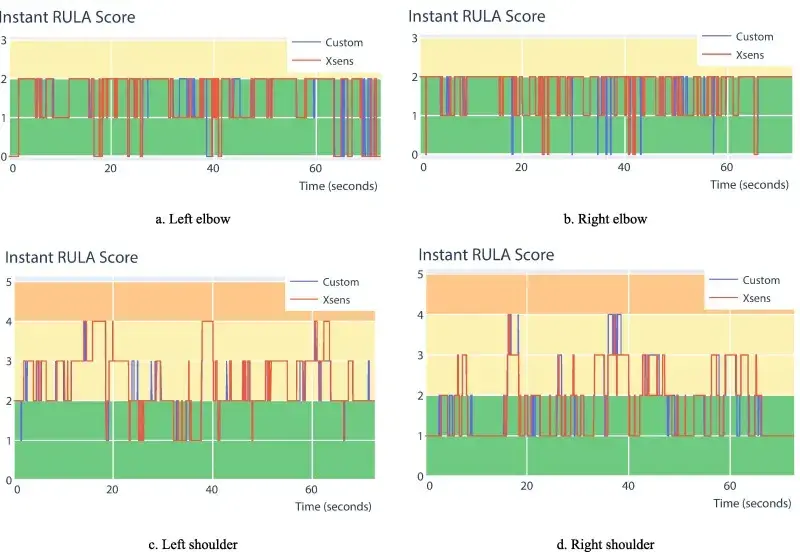
1.通过显示每个关节在每个时刻的 RULA 分数,如图8所示的肘部和肩部屈曲。
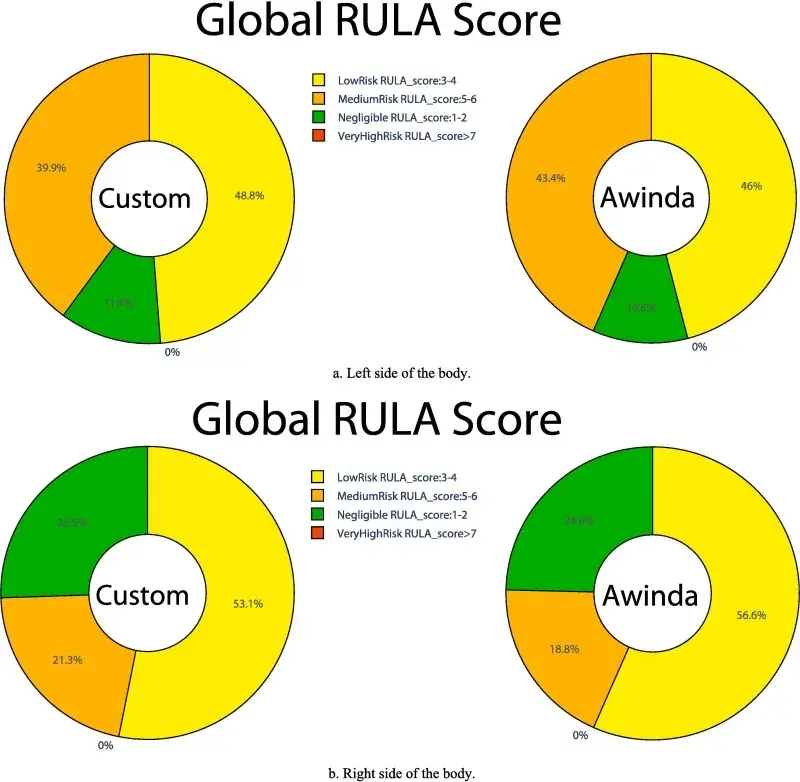
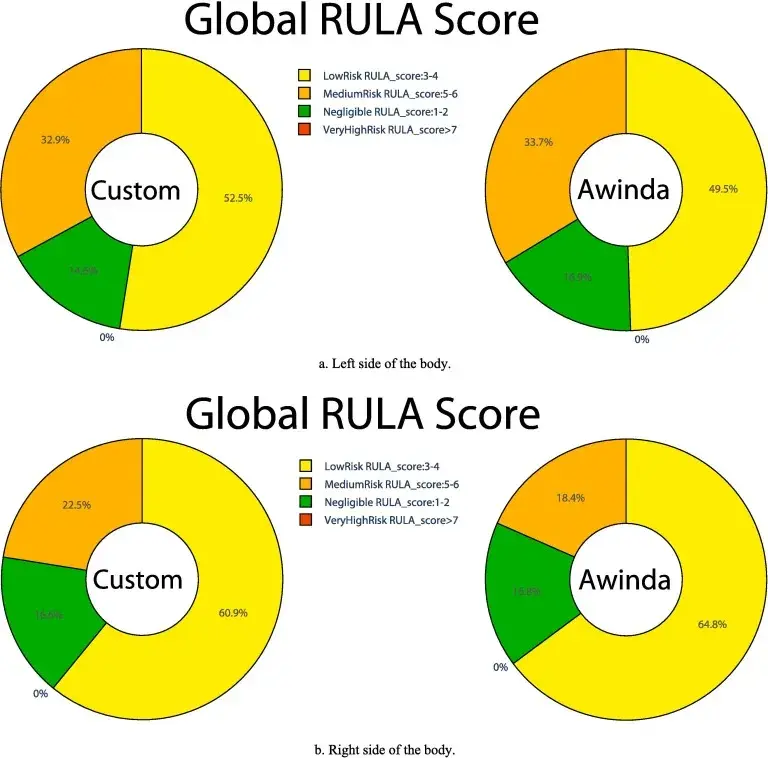
2.显示总周期的风险水平百分比将全局结果以饼状图形式显示,如图9和图10所示。
图8展示出了从图7中的关节角度获得的RULA分数,可以看出,除了非常特定的时刻之外,两个系统如何获得相同的 RULA 分数。
通过添加肘部和肩部得分,并分析总时间内的每个得分范围,研究得出了整体工作站风险。因此,根据建立的关节角度范围,实验可以根据获得的百分比来分析总体受伤风险。该分析被定义为工作周期的全局RULA分数,如图9和图10所示。
从这两个分析中可以看出,两个系统在每个特定时刻的 WMSD 风险评估以及占工作站总体风险的百分比方面获得了相似的结果。此外,对于给定的较高风险观察位置可以获得全局 RULA 评分表。两个系统中人体模型的瞬时表示可以确保对所达到的位置的跟踪,如图5a和图 5b所示。
CONTACT 联系我们
联系人:樊女士
电话:18900616086 京显
邮箱:18900616086@163.com changxian-el@hotmail.com
地址:北京市海淀区中关村南大街5号二683号楼
联系方式▼ 更多咨询关注小程序▼


 产品展示
产品展示

 http://bitbrain.cn/Zz_www.eastsummit.net/index.html
http://bitbrain.cn/Zz_www.eastsummit.net/index.html 
 销售一部
销售一部