


运动控制测试 (MCT) 和适应 (ADT) 测试是对皮层下水平(基底神经节和小脑)的自动姿势控制系统的评估,以响应水平(向后/向前)平移或旋转(脚趾向上/脚趾)向下倾斜)。它们可以测量:
- 反应潜伏期,即扰动与身体保持平衡反应之间的时间。
- 左右两侧对称。
- 中枢运动编程,即大脑将运动组织成模式的能力。
- 身体补偿这些扰动的能力。
-姿势摇摆,身体围绕质心的协调的小幅向前和向后运动
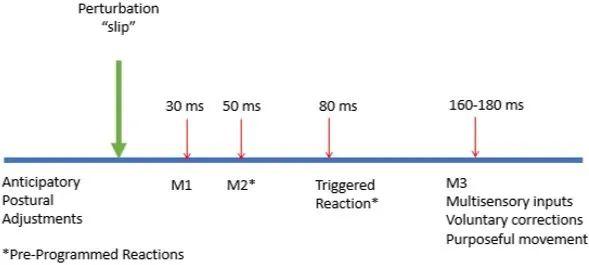
自动单环脊髓反射通路 (M1) 速度最快,而 M2 和 M3 是长潜伏期反射环,涉及多个连接(突触)和通往大脑(初级运动皮层和小脑)的通路。
增加连接数会增加延迟时间。
这些半自动、长延迟的运动模式发生在自愿行动发生之前。
半自动触发反应是指一旦开始运动就能够抑制运动的能力。例如,一旦决定在交通中“走”,就快速刹车。由于中枢运动程序会修改反馈反射反应,因此扰动训练可以改善这些半自动反应。表 1 描述了运动控制领域两位巨头 Nikolai Bernstein 和 RA Schmidt工作综合中扰动后的事件顺序。
表 1:自动、半自动和自愿姿势控制期间运动行为的顺序
| Bernstein大脑 | Schmidt类型 | 延迟范围 | 复杂 |
| 皮质下 | M1 | 30 - 50 ms | 单突触牵张反射 |
| 皮质下 | M2 | 50 - 80 ms | ·脊髓反射·脊髓上(1o运动皮层、小脑)·半自动长环反射 |
| 皮质下/皮质 | 触发反应 | 80 - 120 ms | ·运动习惯、预先设定的反应·发生得太快而无法自愿 |
| 皮质 | 自主反应时间M3 | 160 - 180 ms | 自愿行动 |
●●●
我们如何测量对姿势扰动的预编程反应?———————————————
电机控制测试 (MCT) 测量测力台移动后发生的长延迟响应(M2-M3,触发反应)。
MCT 潜伏期分数基于 CoP 的快速变化,这种变化是在受力板突然平移后姿势肌肉响应控制 COG 时发生的。
Bertec 测力台采样频率为 1000 次/秒,可在 120-140 毫秒的延迟间隔内捕获 120-140 个 CoP 样本,使其在检测 CoP 运动的高频分量方面高度灵敏。
我们可以训练半自动程序吗?———————————————
总之,这些中央运动模式可以通过先前的经验(例如,当我们在楼梯底部迈出额外的一步,同时期待另一个楼梯时)或训练前给出的指示来修改。
有证据支持训练的特殊性:为了改善这些半自动姿势反应,训练必须复制运动控制任务的姿势要求。扰动训练将神经肌肉反应从髋膝策略转变为踝策略,而不改变 M1 潜伏时间,这意味着训练产生了更有效的姿势控制策略来应对突然的平衡挑战。
使用倾斜板、球和泡沫来改变表面或通过推动身体的扰动训练通常会导致夸大的保护反应,但无法解决环境背景或平衡的感知挑战。
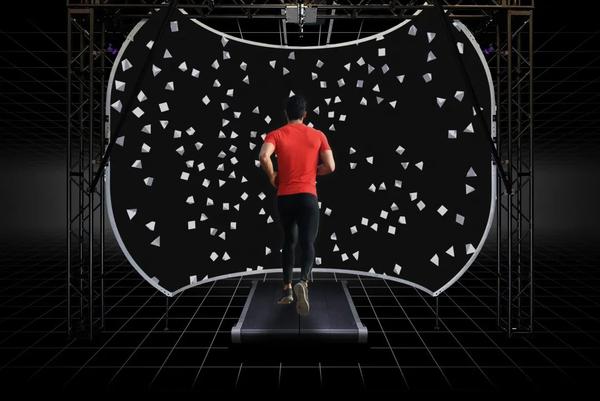
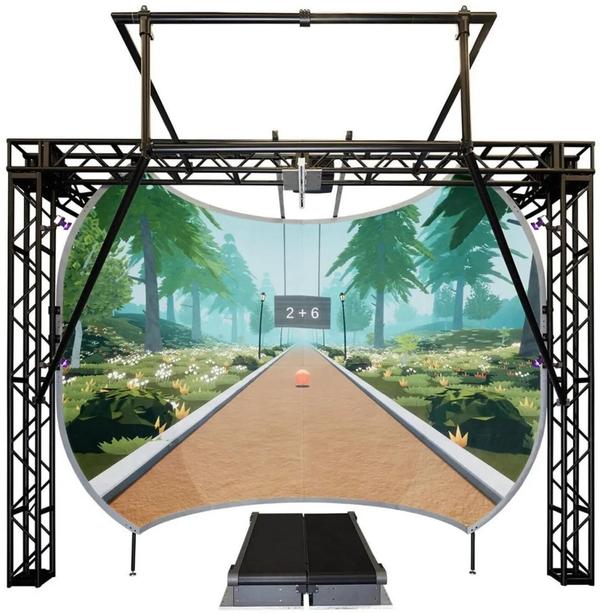
沉浸式虚拟现实 (IVR) 测力台平衡训练程序可以精确选择训练变量并测量肉眼看不见的变化,从而克服了这些限制。
在计划治疗时我应该考虑哪些姿势运动控制问题?———————————————
运动控制和姿势稳定性取决于以下每个域之间的相互作用:
●生物力学:强度、稳定性极限;使用什么策略来保持平衡:脚踝还是臀部?
●运动策略:它们是反射性的、自愿性的还是介于两者之间?
●感觉策略:体感、视觉和前庭系统之间的感觉整合和重新加权是如何发生的?
●空间定向:感知的准确性和垂直度(参见主观视觉垂直(SVV)和跌倒风险(ROF))
●功能、步态和运动的动态控制
●复杂环境下的认知处理和注意力分散:这对日常生活和运动中的动态姿势稳定性有何影响?
【沉浸式实验室】
Bertec Immersive Labs 是一个用于生物力学分析的综合研究系统。
如您有相关产品需要咨询或购买,请联系我们!
CONTACT 联系我们
联系人:樊女士
电话:18900616086 京显
邮箱:18900616086@163.com changxian-el@hotmail.com
地址:北京市海淀区中关村南大街5号二683号楼
联系方式▼ 更多咨询关注小程序▼


 产品展示
产品展示
 http://bitbrain.cn/Zz_www.eastsummit.net/index.html
http://bitbrain.cn/Zz_www.eastsummit.net/index.html 
 销售一部
销售一部