产品中心
产品分类
产品分类
品牌标签
品牌标签


产品介绍
SIROCCO六足机器人是一款大型强有力的系统,专为在六个自由度(Rx、Ry、Rz、Tx、Ty、Tz)内移动重物而设计。
DCNS公司采用SIROCCO六足机器人作为潜艇模拟器,用于训练目的,以再现潜艇乘员在任务中可能遇到的紧急情况。
GTT公司设计的低温膜式储罐系统应用于造船业,用于液化天然气(LNG)运输。SIROCCO六足机器人使GTT实验室能够研究流动液体(即晃动现象)对其隔热层的影响。
FMC技术公司采用两台SIROCCO XL六足机器人测试1/4比例LNG装载臂。这些六足机器人模拟海浪运动,用于验证连接气罐船与海上天然气生产工厂的装载臂性能。其中一台模拟气罐船,另一台模拟海上工厂。
性能特点
强大的载重能力
简单可靠的软件系统
卓绝的速度与加速性能
可增配独立测量系统以提升精度
有效载荷 2 吨
线性行程范围 ± 600 毫米
角行程范围 ± 40°
技术参数
|
产地 |
加拿大 |
|
行程范围 Tx, Ty (mm) |
± 600 |
|
行程范围 Tz (mm) |
± 500 |
|
行程范围 Rx, Ry (deg) |
± 40 |
|
行程范围 Rz (deg) |
± 40 |
|
速度 Tx, Ty (mm/s) |
2,000 |
|
速度 Tz (mm/s) |
1,800 |
|
速度Rx, Ry(度/秒) |
200 |
|
速度Rz(度/秒) |
100 |
|
加速度Tx, Ty(毫米/秒²) |
6,000 |
|
加速度Tz(毫米/秒²) |
6,000 |
|
加速度Rx, Ry(度/秒²) |
1,200 |
|
加速度 Rz (度/秒²) |
600 |
|
有效载荷能力 (千克) |
2,000 (仅垂直方向) |
|
电机类型 |
无刷 |
|
工作温度范围 (°C) |
0 至 +50 |
|
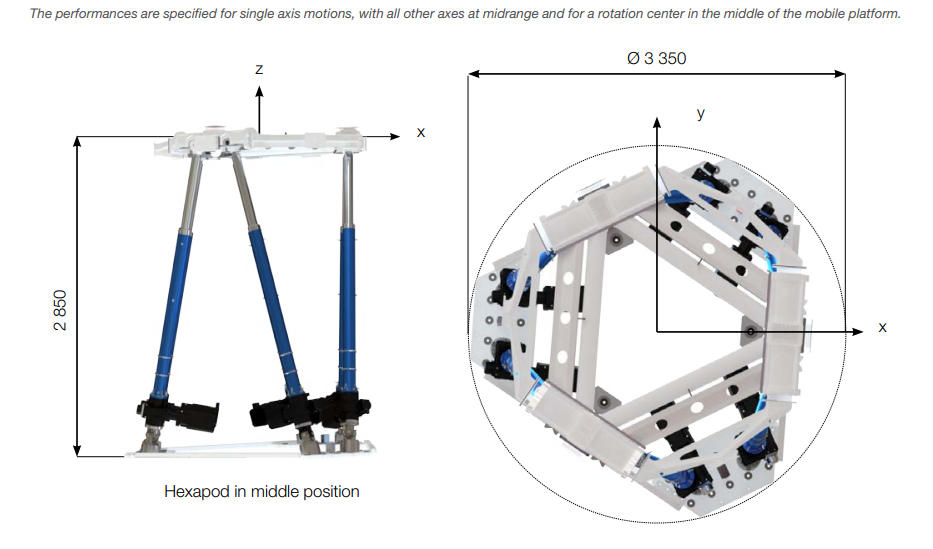
移动平台尺寸 (毫米) |
Ø3,350 |
|
中位高度 (毫米) |
~2,850 |
|
重量(千克) |
约850 |
|
电缆长度(米) |
15 |
|
接口 |
以太网 |
|
电源 |
380 VAC(三相)/ 250 A |
产品应用
涌浪模拟
晃动试验
潜艇模拟
高载荷动态试验




 苏州长显
苏州长显