核心概念解析
传感器分辨率(Sensor Resolution)
传感器分辨率是指位置传感器能够检测到的最小位移量,也称为传感器灵敏度。这是执行器/平台分辨率的理论下限。
重要提示:此参数仅反映传感器的位移检测能力,与执行器或平台的实际性能无直接关联。切勿将此参数误判为系统性能指标。
传感器精度(Sensor accuracy)
传感器精度是指传感器读数相对于经校准标准且具有计量溯源性的绝对偏差。误差主要源于传感器刻度不完美和装配对齐误差。
选购建议:传感器精度误差具有高度重复性,可通过系统校准进行补偿。在99%的应用场景中,此参数并非关键考量因素。
核心性能指标
执行器/平台分辨率(=最小步进尺寸)Stage / actuator resolution (= minimal step size)
分辨率是压电定位系统可控制的最小机械位移量,受传感器分辨率、机械因素(摩擦、顺应性、接触点非线性等)和位置控制性能共同影响。
核心价值:这是衡量系统精度的关键指标(某些情况下,执行器/平台分辨率与编码器分辨率可能存在显著差异),决定了执行器或平台可实现的最小步进尺寸。与执行器重复性共同构成最重要的性能参数。
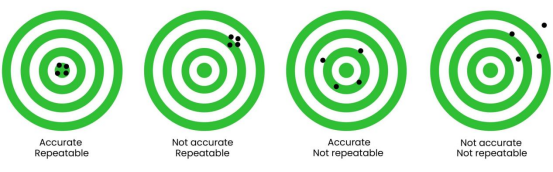
执行器/平台重复性
重复性衡量系统在相同条件下返回特定位置的能力:
单向重复性:从相同起点返回指定点的稳定能力
双向重复性:从任意位置返回指定点的精度
选购重点:双向重复性是更严格的性能指标,反映了系统在实际使用中的真实表现。优秀的闭环控制系统应具备卓越的双向重复性。
执行器/平台精度
执行器精度直接取决于传感器精度,这是由于直接驱动原理和紧凑的结构设计。
选购建议:无需过度关注此项,理解编码器精度即可把握执行器精度。注意区分精度与误差运动这两个独立参数。
误差运动特性
旋转台的误差运动
根据ANSI/ASME B89.3.4标准,旋转台旋转轴的误差运动定义为:当工件中心线与旋转轴重合时,完美工件表面相对于基准坐标轴的位置变化,该变化随旋转角度变化而变化。换言之,理想旋转台仅具有单一自由度,即围绕z轴的旋转运动。
然而由于完美旋转台并不存在,其余五个自由度产生的任何运动均称为旋转轴误差运动或简称为误差运动。根据误差方向可区分两类径向误差、一类轴向误差以及两类倾斜或摆动误差。此外,旋转平台的误差运动可分解为同步与异步两部分。平台误差运动常被误称为平台跳动。
选购旋转平台时务必考虑误差运动因素。旋转盘的晃动行为显然会对实验结果产生重大影响。
线性平台误差运动
线性系统的误差运动包括:
直线度误差straightness error:水平面的侧向偏差
平面度误差flatness error:垂直面的高度变化
角向误差angular error:俯仰pitch、横滚roll 和偏航yaw
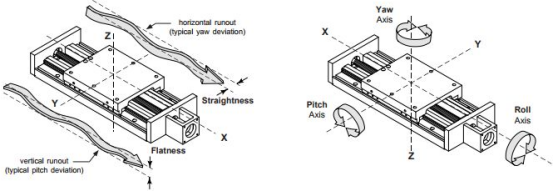
关键区别:执行器设计用于推拉运动,允许一定误差;平台设计目标是零误差运动,需支撑负载并保持精确轨迹。
实际应用考量
移动速度
最大移动速度直接影响系统吞吐量。对于扫描测量应用,速度稳定性同样重要。
选购建议:长行程应用需优先考虑高移动速度,以避免生产效率损失。
使用寿命
粘滑式压电系统:约20-30公里行程
超声波压电系统(如Xeryon):超过1000公里
重要提示:压电陶瓷磨损产生的粉尘可能污染实验环境。高频应用应优先选择长寿命产品。
声学与振动
压电系统基于振动原理工作:
可听频率范围(20Hz-20kHz):可能产生干扰噪音
超声波系统(80kHz-180kHz):运行静音,共振风险低
应用建议:实验室环境优先考虑超声波压电系统,避免设备共振和噪音干扰。
保持力与驱动力
驱动力:沿运动方向推拉负载的能力
保持力:系统抵抗外部位移的能力
关键考量:
水平运动:主要克服摩擦和惯性
垂直运动:需确保驱动力大于负载重力
高加速度应用:需要大驱动力
节能或减振应用:重视被动保持力
Xeryon由比利时鲁汶大学知名研究团队"微米与精密工程"的三位研究人员于2013年创立。历经十余年发展,凭借其专有技术,该公司已成为紧凑型运动产品领域不可忽视的力量。可为多行业提供全面的压电解决方案:
应用领域:
高性能环境:医疗设备、半导体制造、航空航天、计量学
科研应用:材料科学、成像技术、医学研究
产品特点:
开环/闭环系统可选
执行器与平台齐全
非磁性及真空兼容版本
抗振动组件
标准产品与定制解决方案

 苏州长显
苏州长显